PID控制原理基本介绍(图解)
文章标签:
《随便一记》
PID控制原理基本介绍(图解)
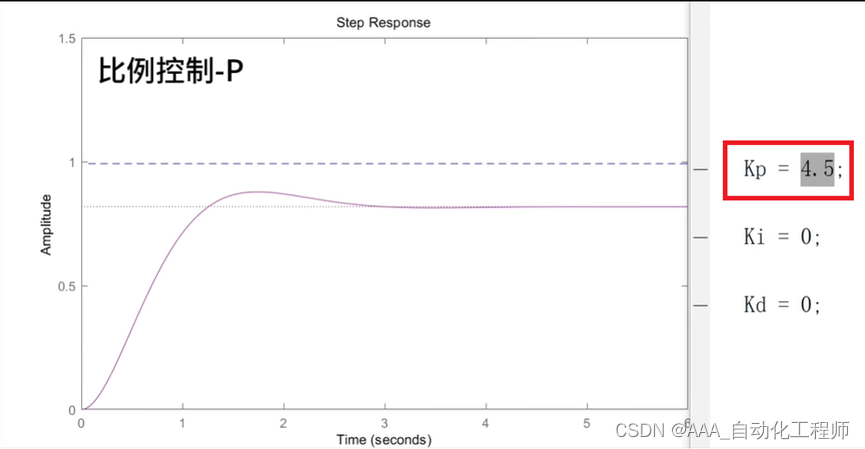
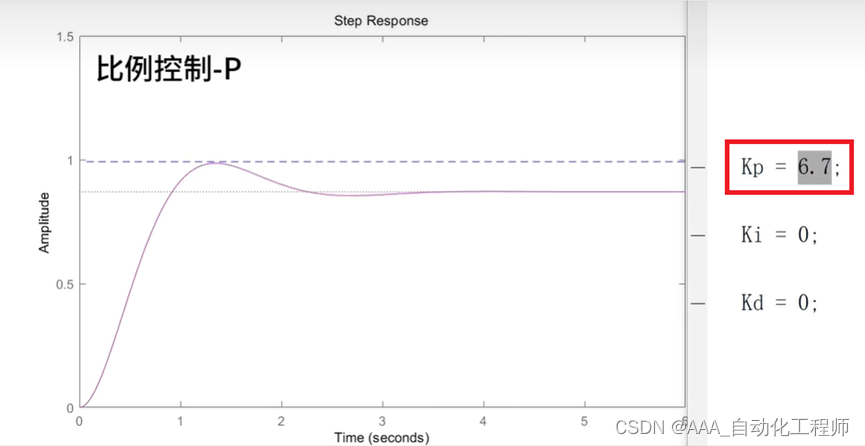
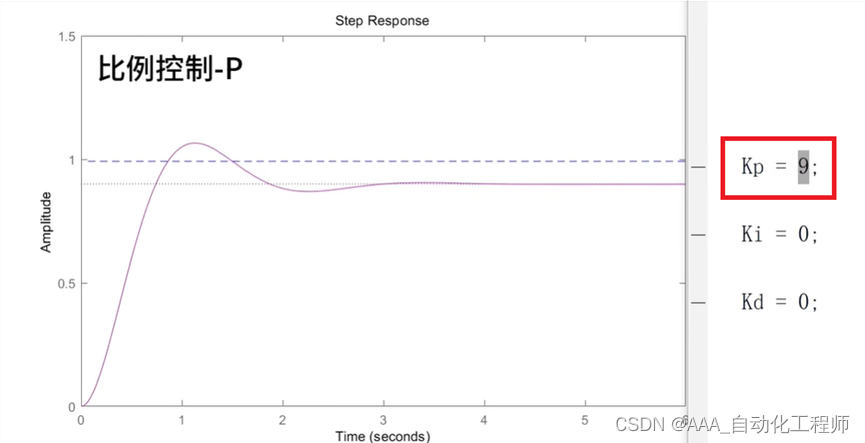
| 这里先以一个阶跃响应做图解说明: |
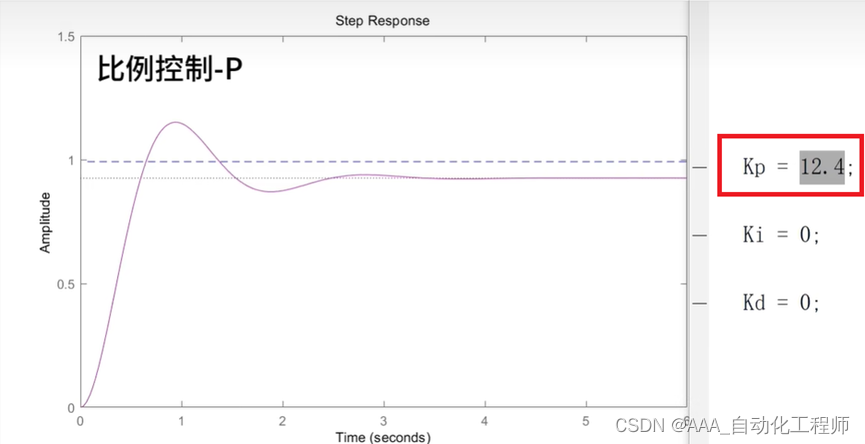
如下图所示,目标值设定为单位1,随着我们逐渐增大比例系数Kp,可以看到系统相应速度逐渐加快,但是始终存在稳态误差,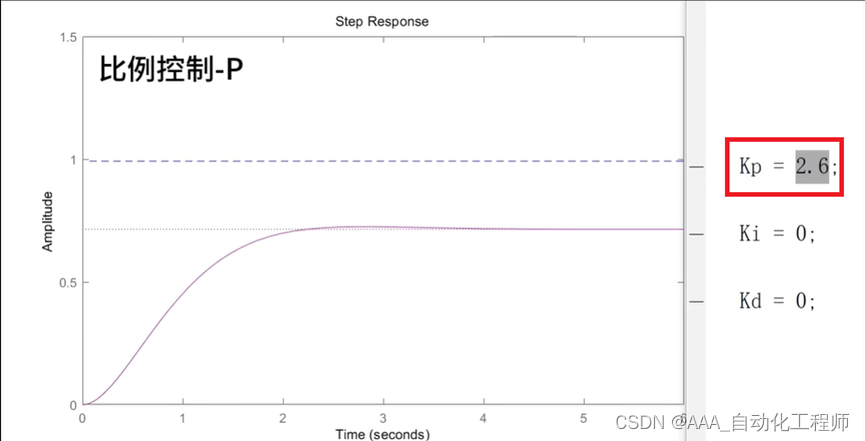
如下图所示,引入积分环节后,随着积分控制系数Ki逐渐加大,误差逐渐减小,并最终达到我们的设定值,但是Ki到达一定程度后,会导致系统超调量增大如,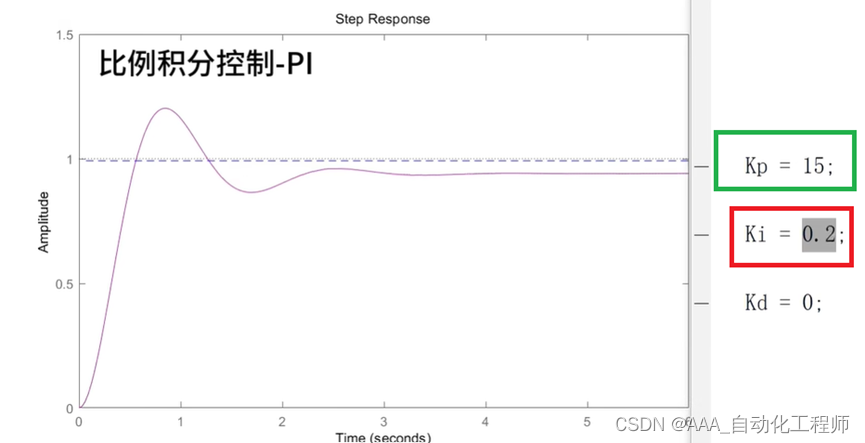
登录后可发表评论
点击登录