前期准备
下载webots webots基本知识a. 官方文档:Webots documentation: Track
b. B站教程:webots-超详细入门教程(2020)_哔哩哔哩_bilibili
搭建流程
搭建履带机器人主要使用到了webots中的track节点,这个节点是专门用来定义履带的相关属性,模拟履带运动的
首先,创建一个项目,可以命名为 track_robot.wbt,生成背景、光源和矩形区域
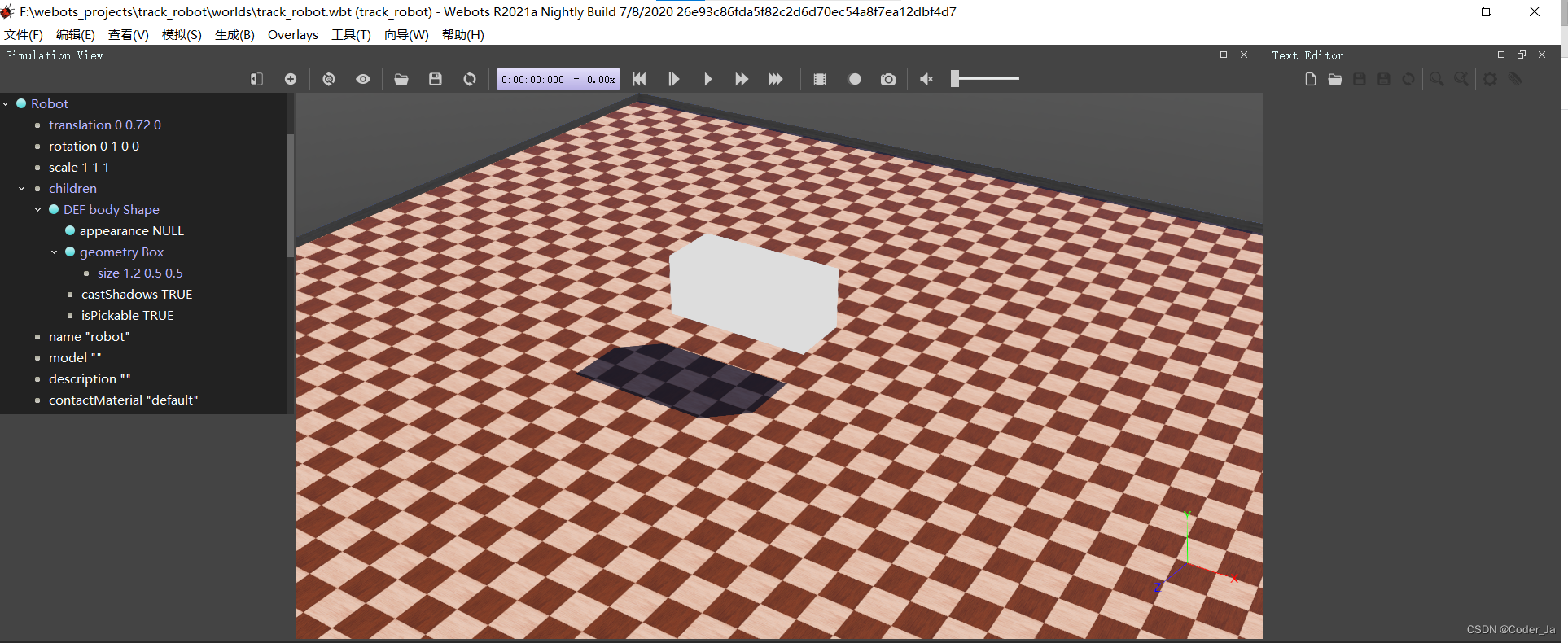
然后,我们创建一个Robot节点,作为整个履带机器人的根节点。这个节点我们把它的形状设为一个长方体(一般根节点的模型都取机器人中心部分机架,这样在添加关节和考虑关节的运动时比较自然)
尺寸: x:1.2
y:0.5
z:0.5
然后,作为Robot节点的子节点创建track节点。这里就直接创建节点就行,不用加关节,因为履带相对于机架是固连的。
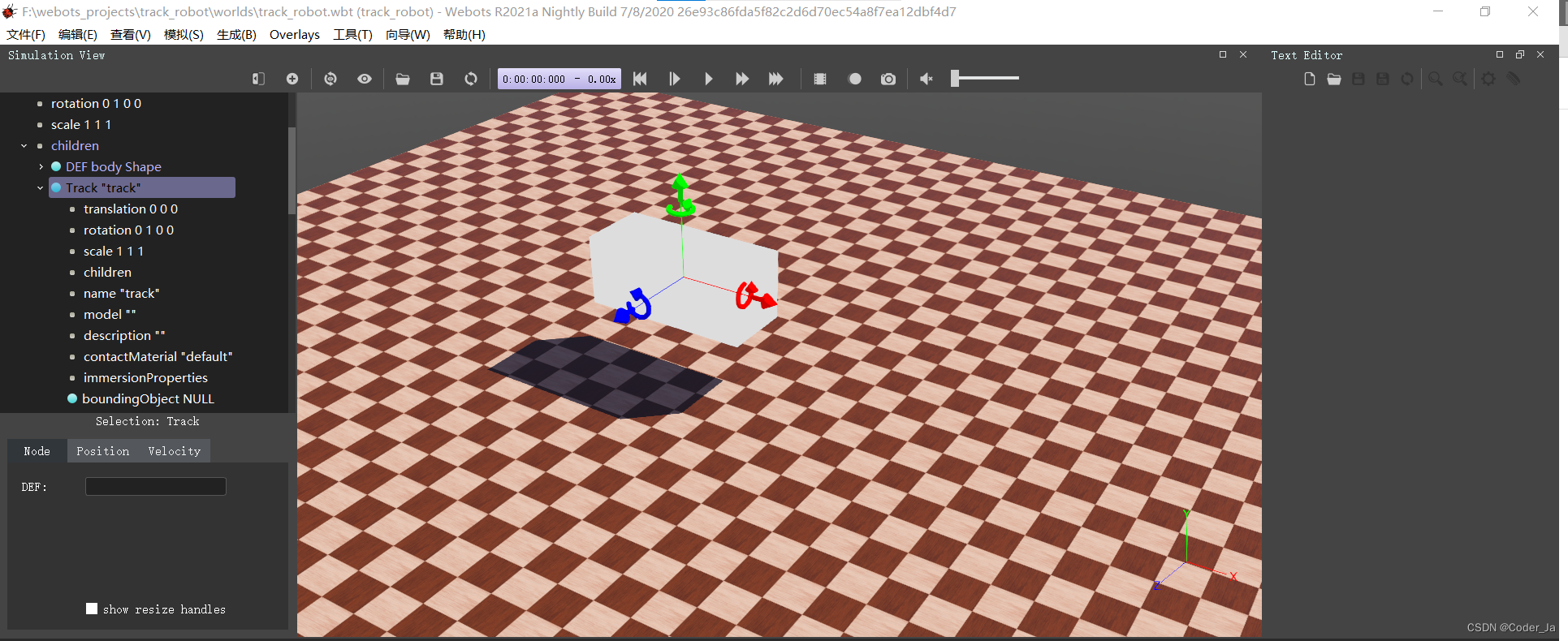
track节点中对于搭建履带比较关键的几个字段是:chidren中的TrackWheel、boundingObject、animateGeometry、geometriesCount
geometriesCount规定了一圈履带的履带板数量
下图分别为geometriesCount为5和15时的履带形态
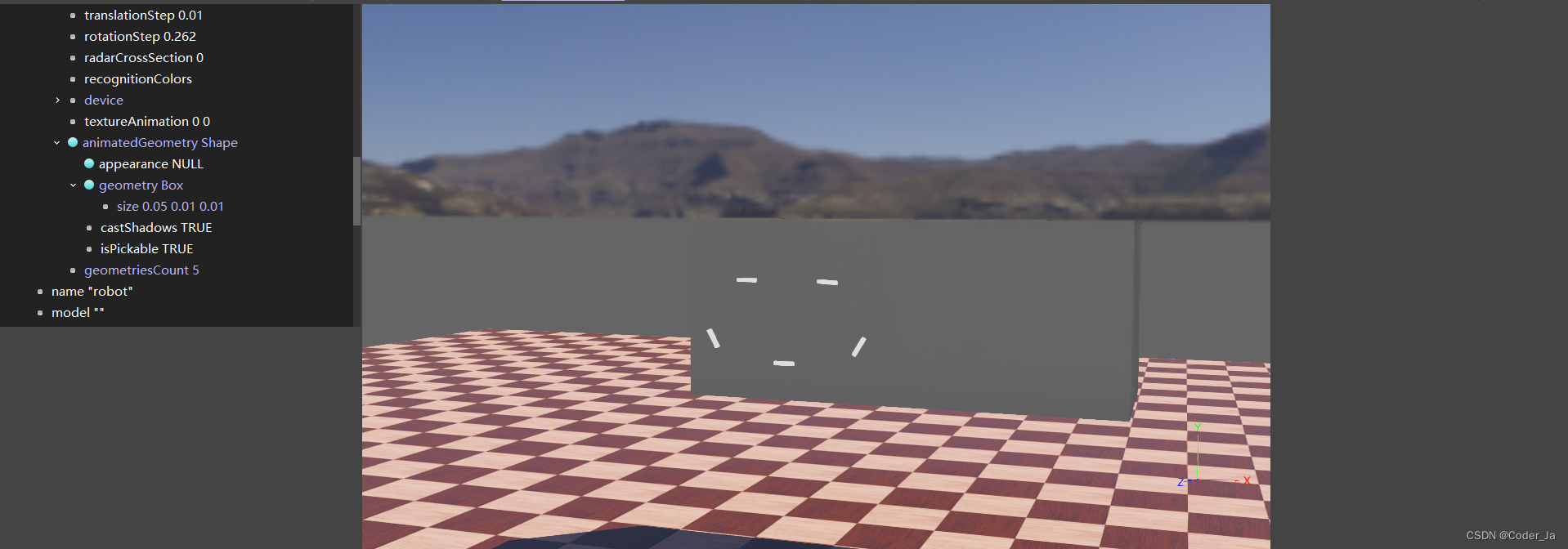
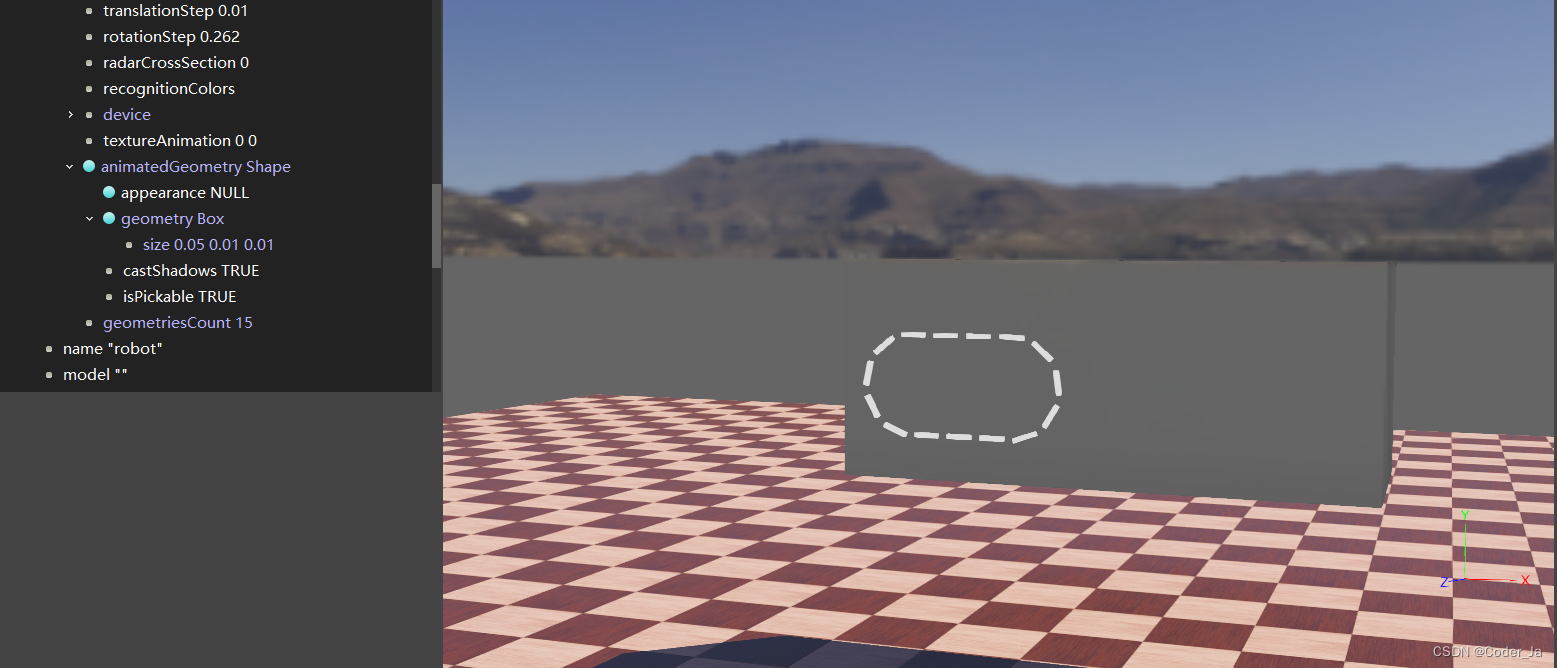
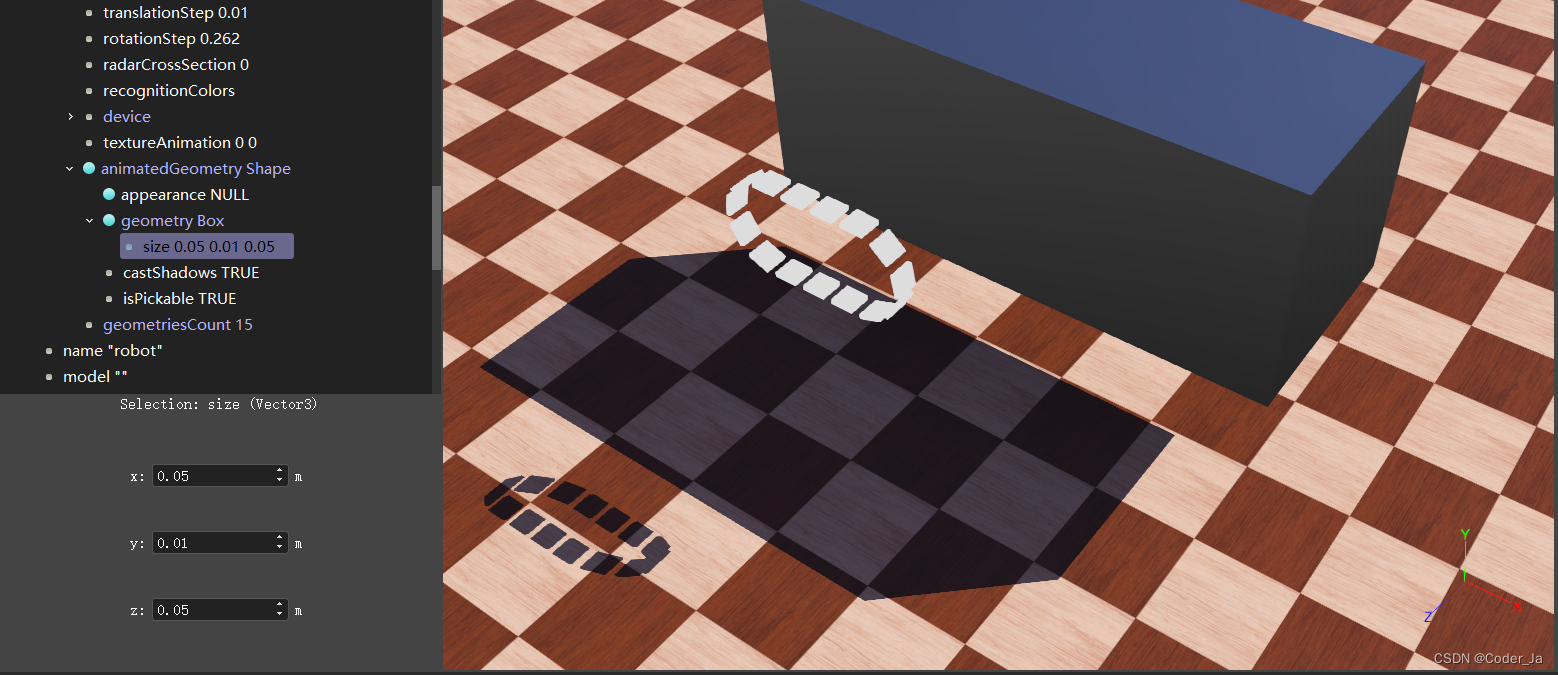
animateGeometry定义了履带板的形状和尺寸
当设置的形状为Box时履带是长方体
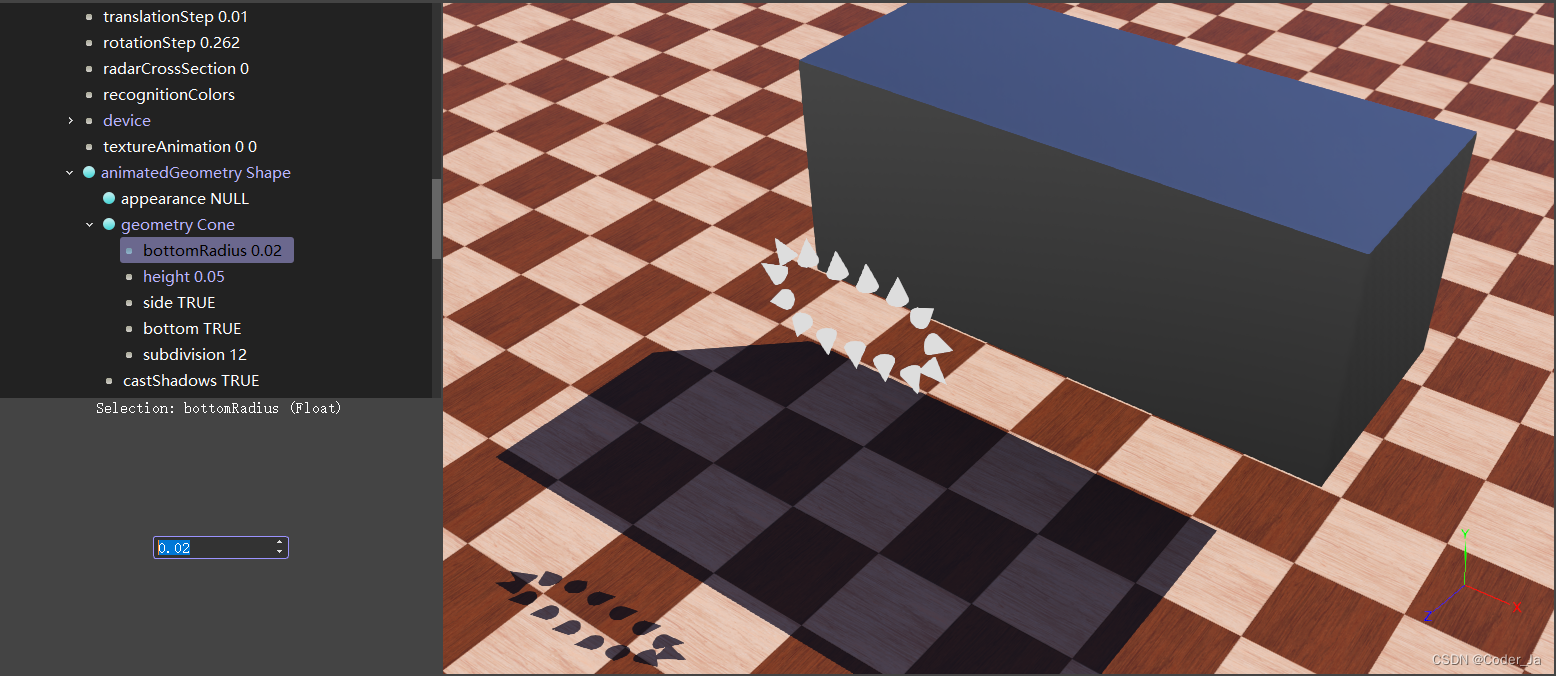
而当设置的形状为Cone时又会生成圆锥体的履带板
根据官方文档,TrackWheel节点是用来勾勒履带的轨迹的。当TrackWheel的半径及位置确定后,软件会自动生成一个与所有TrackWheel的圆边相贴合的履带。
官方文档的图片很清楚