
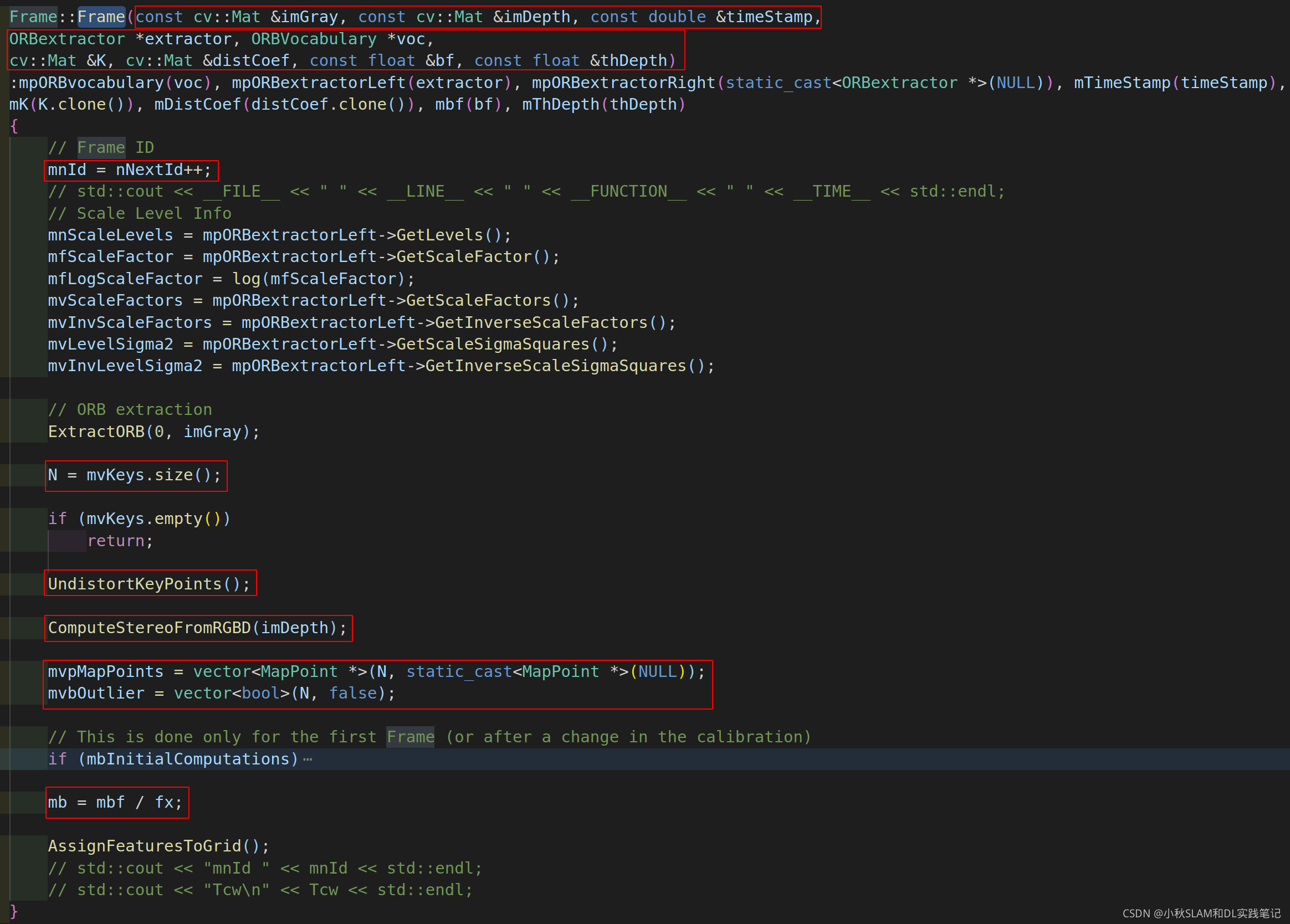
 生成帧会传入彩色图mImGray、深度图imDepth、时间戳timestamp、左目提提取特征的指针mpORBextractorLeft、词典指针mpORBVocabulary、相机内参mK、畸变系数mDistCoef、基线×焦距mbf、深度因子mThDepth
生成帧会传入彩色图mImGray、深度图imDepth、时间戳timestamp、左目提提取特征的指针mpORBextractorLeft、词典指针mpORBVocabulary、相机内参mK、畸变系数mDistCoef、基线×焦距mbf、深度因子mThDepth
帧有一个全局的唯一IDmnId = nNextId++
然后传入彩色图提取特征ExtractORB(0, imGray)
 这里使用mpORBextractorLeft提取图像特征,然后将特征存储在
这里使用mpORBextractorLeft提取图像特征,然后将特征存储在std::vector<cv::KeyPoint> mvKeys,、描述子存储在cv::Mat mDescriptors