目录
一:红绿灯识别检测效果展示
二:红绿灯识别检测具体步骤
1.初始化设置,对亮度设置 视频路径 进行初始化设置
2.帧处理,调整视频亮度,分解YCrCb的三个成分,拆分红和绿,对这两种颜色进行特征提取
3.腐蚀膨胀处理,去除其他噪点,提高红绿灯提取特征
4.红绿灯识别检测,给出识别结果显示
5.对红灯和绿灯进行轮廓提取
6.确定两个矩形区域是否相交
三: 红绿灯识别检测源码分享
一:红绿灯识别检测效果展示
使用到了OpenCV轮廓识别
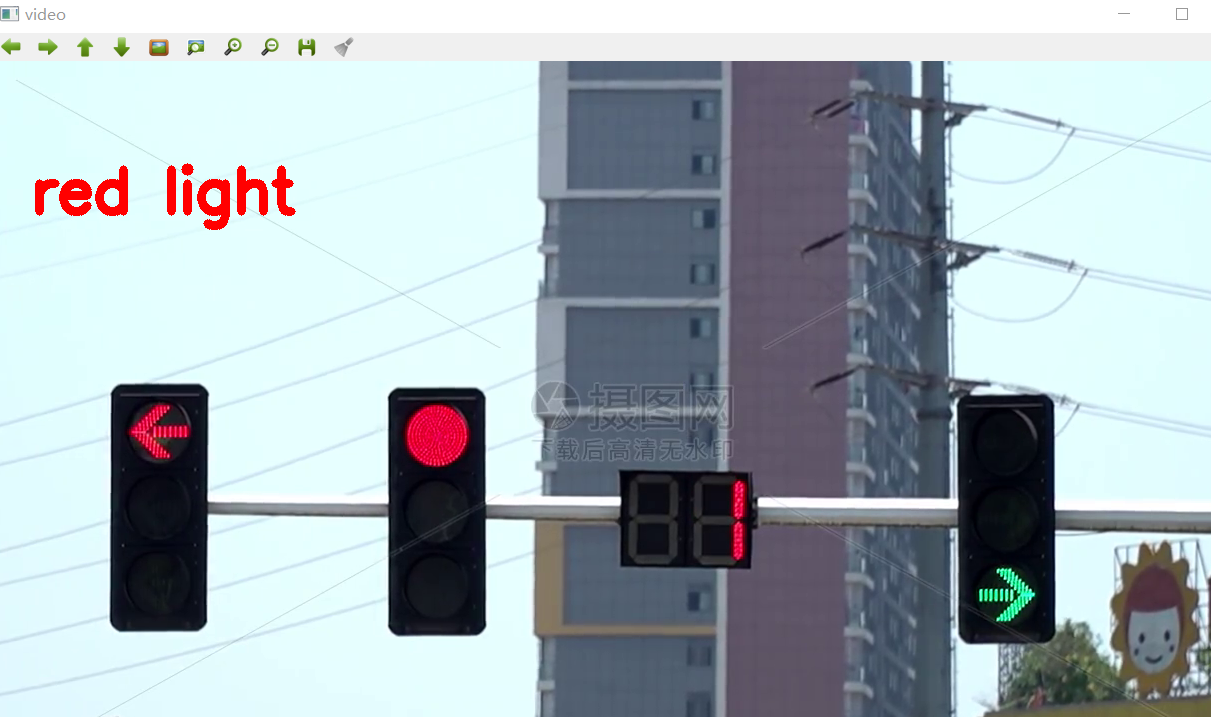
如上图 轮廓识别 分别检测识别出红灯 绿灯 [检测出来的红灯轮廓和绿灯轮廓如下图所示]
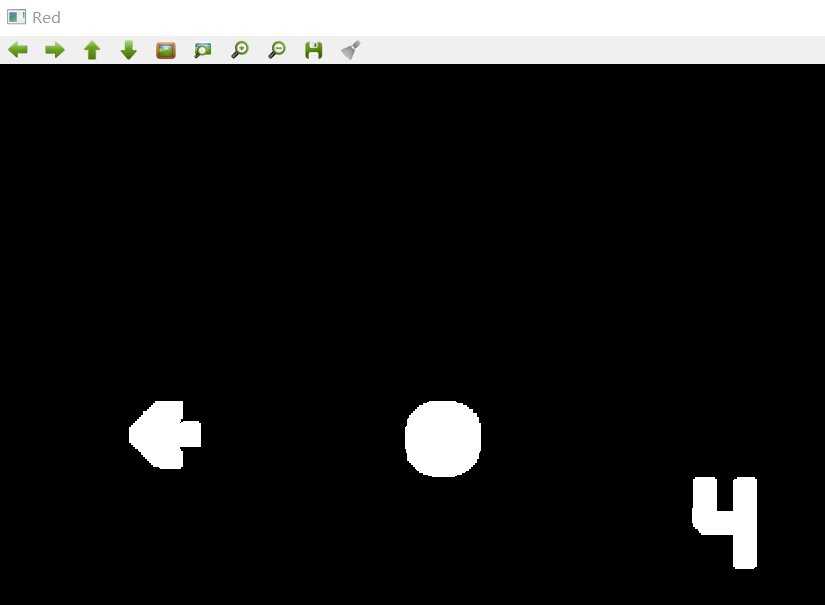

在红绿灯都亮时,可以检测到数值

当红灯不亮 绿灯亮时,红灯没有数值 绿灯显示数值

当拍摄车辆通行,也就是红绿灯都不亮的时候,红灯绿灯都没有数值

二:红绿灯识别检测具体步骤
1.初始化设置,对亮度设置 视频路径 进行初始化设置
int redCount = 0; int greenCount = 0; Mat frame; Mat img; Mat imgYCrCb; Mat imgGreen; Mat imgRed; // 亮度参数 double a = 0.3; double b = (1 - a) * 125; VideoCapture capture("D:/00000000000003jieduanshipincailliao/123.mp4");//导入视频的路径 if (!capture.isOpened()) { cout << "Start device failed!\n" << endl;//启动设备失败! return -1; }2.帧处理,调整视频亮度,分解YCrCb的三个成分,拆分红和绿,对这两种颜色进行特征提取
// 帧处理 while (1) { capture >> frame; //调整亮度 frame.convertTo(img, img.type(), a, b); //转换为YCrCb颜色空间 cvtColor(img, imgYCrCb, CV_BGR2YCrCb); imgRed.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1); imgGreen.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1); //分解YCrCb的三个成分 vector<Mat> planes; split(imgYCrCb, planes); // 遍历以根据Cr分量拆分红色和绿色 MatIterator_<uchar> it_Cr = planes[1].begin<uchar>(), it_Cr_end = planes[1].end<uchar>(); MatIterator_<uchar> it_Red = imgRed.begin<uchar>(); MatIterator_<uchar> it_Green = imgGreen.begin<uchar>(); for (; it_Cr != it_Cr_end; ++it_Cr, ++it_Red, ++it_Green) { // RED, 145<Cr<470 红色 if (*it_Cr > 145 && *it_Cr < 470) *it_Red = 255; else *it_Red = 0; // GREEN 95<Cr<110 绿色 if (*it_Cr > 95 && *it_Cr < 110) *it_Green = 255; else *it_Green = 0; }3.腐蚀膨胀处理,去除其他噪点,提高红绿灯提取特征
//膨胀和腐蚀 dilate(imgRed, imgRed, Mat(15, 15, CV_8UC1), Point(-1, -1)); erode(imgRed, imgRed, Mat(1, 1, CV_8UC1), Point(-1, -1)); dilate(imgGreen, imgGreen, Mat(15, 15, CV_8UC1), Point(-1, -1)); erode(imgGreen, imgGreen, Mat(1, 1, CV_8UC1), Point(-1, -1)); redCount = processImgR(imgRed); greenCount = processImgG(imgGreen); cout << "red:" << redCount << "; " << "green:" << greenCount << endl;4.红绿灯识别检测,给出识别结果显示
if(redCount == 0 && greenCount == 0) { cv::putText(frame, "lights out", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(255, 255, 255), 8, 8, 0); }else if(redCount > greenCount) { cv::putText(frame, "red light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 8, 8, 0); }else{ cv::putText(frame, "green light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 255, 0), 8, 8, 0); }5.对红灯和绿灯进行轮廓提取
int processImgR(Mat src){ Mat tmp; vector<vector<Point>> contours; vector<Vec4i> hierarchy; vector<Point> hull; CvPoint2D32f tempNode; CvMemStorage* storage = cvCreateMemStorage(); CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage); Rect* trackBox; Rect* result; int resultNum = 0; int area = 0; src.copyTo(tmp); //提取轮廓 findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE); if (contours.size() > 0) { trackBox = new Rect[contours.size()]; result = new Rect[contours.size()]; //确定要跟踪的区域 for (int i = 0; i < contours.size(); i++) { cvClearSeq(pointSeq); // 获取凸包的点集 convexHull(Mat(contours[i]), hull, true); int hullcount = (int)hull.size(); // 凸包的保存点 for (int j = 0; j < hullcount - 1; j++) { tempNode.x = hull[j].x; tempNode.y = hull[j].y; cvSeqPush(pointSeq, &tempNode); } trackBox[i] = cvBoundingRect(pointSeq); } if (isFirstDetectedR) { lastTrackBoxR = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) lastTrackBoxR[i] = trackBox[i]; lastTrackNumR = contours.size(); isFirstDetectedR = false; } else { for (int i = 0; i < contours.size(); i++) { for (int j = 0; j < lastTrackNumR; j++) { if (isIntersected(trackBox[i], lastTrackBoxR[j])) { result[resultNum] = trackBox[i]; break; } } resultNum++; } delete[] lastTrackBoxR; lastTrackBoxR = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) { lastTrackBoxR[i] = trackBox[i]; } lastTrackNumR = contours.size(); } delete[] trackBox; } else { isFirstDetectedR = true; result = NULL; } cvReleaseMemStorage(&storage); if (result != NULL) { for (int i = 0; i < resultNum; i++) { area += result[i].area(); } } delete[] result; return area;}int processImgG(Mat src){ Mat tmp; vector<vector<Point> > contours; vector<Vec4i> hierarchy; vector< Point > hull; CvPoint2D32f tempNode; CvMemStorage* storage = cvCreateMemStorage(); CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage); Rect* trackBox; Rect* result; int resultNum = 0; int area = 0; src.copyTo(tmp); //提取轮廓 findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE); if (contours.size() > 0) { trackBox = new Rect[contours.size()]; result = new Rect[contours.size()]; // 确定要跟踪的区域 for (int i = 0; i < contours.size(); i++) { cvClearSeq(pointSeq); // 获取凸包的点集 convexHull(Mat(contours[i]), hull, true); int hullcount = (int)hull.size(); // 保存凸包的点 for (int j = 0; j < hullcount - 1; j++) { tempNode.x = hull[j].x; tempNode.y = hull[j].y; cvSeqPush(pointSeq, &tempNode); } trackBox[i] = cvBoundingRect(pointSeq); } if (isFirstDetectedG) { lastTrackBoxG = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) lastTrackBoxG[i] = trackBox[i]; lastTrackNumG = contours.size(); isFirstDetectedG = false; } else { for (int i = 0; i < contours.size(); i++) { for (int j = 0; j < lastTrackNumG; j++) { if (isIntersected(trackBox[i], lastTrackBoxG[j])) { result[resultNum] = trackBox[i]; break; } } resultNum++; } delete[] lastTrackBoxG; lastTrackBoxG = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) { lastTrackBoxG[i] = trackBox[i]; } lastTrackNumG = contours.size(); } delete[] trackBox; } else { isFirstDetectedG = true; result = NULL; } cvReleaseMemStorage(&storage); if (result != NULL) { for (int i = 0; i < resultNum; i++) { area += result[i].area(); } } delete[] result; return area;}6.确定两个矩形区域是否相交
//确定两个矩形区域是否相交bool isIntersected(Rect r1, Rect r2){ int minX = max(r1.x, r2.x); int minY = max(r1.y, r2.y); int maxX = min(r1.x + r1.width, r2.x + r2.width); int maxY = min(r1.y + r1.height, r2.y + r2.height); if (minX < maxX && minY < maxY) return true; else return false;}三: 红绿灯识别检测源码分享
#include "opencv2/opencv.hpp"#include "opencv2/imgproc.hpp"#include <windows.h>#include <iostream>using namespace std;using namespace cv;// Function headersint processImgR(Mat);int processImgG(Mat);bool isIntersected(Rect, Rect);// Global variablesbool isFirstDetectedR = true;bool isFirstDetectedG = true;Rect* lastTrackBoxR;Rect* lastTrackBoxG;int lastTrackNumR;int lastTrackNumG;//主函数int main(){ int redCount = 0; int greenCount = 0; Mat frame; Mat img; Mat imgYCrCb; Mat imgGreen; Mat imgRed; // 亮度参数 double a = 0.3; double b = (1 - a) * 125; VideoCapture capture("D:/00000000000003jieduanshipincailliao/123.mp4");//导入视频的路径 if (!capture.isOpened()) { cout << "Start device failed!\n" << endl;//启动设备失败! return -1; } // 帧处理 while (1) { capture >> frame; //调整亮度 frame.convertTo(img, img.type(), a, b); //转换为YCrCb颜色空间 cvtColor(img, imgYCrCb, CV_BGR2YCrCb); imgRed.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1); imgGreen.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1); //分解YCrCb的三个成分 vector<Mat> planes; split(imgYCrCb, planes); // 遍历以根据Cr分量拆分红色和绿色 MatIterator_<uchar> it_Cr = planes[1].begin<uchar>(), it_Cr_end = planes[1].end<uchar>(); MatIterator_<uchar> it_Red = imgRed.begin<uchar>(); MatIterator_<uchar> it_Green = imgGreen.begin<uchar>(); for (; it_Cr != it_Cr_end; ++it_Cr, ++it_Red, ++it_Green) { // RED, 145<Cr<470 红色 if (*it_Cr > 145 && *it_Cr < 470) *it_Red = 255; else *it_Red = 0; // GREEN 95<Cr<110 绿色 if (*it_Cr > 95 && *it_Cr < 110) *it_Green = 255; else *it_Green = 0; } //膨胀和腐蚀 dilate(imgRed, imgRed, Mat(15, 15, CV_8UC1), Point(-1, -1)); erode(imgRed, imgRed, Mat(1, 1, CV_8UC1), Point(-1, -1)); dilate(imgGreen, imgGreen, Mat(15, 15, CV_8UC1), Point(-1, -1)); erode(imgGreen, imgGreen, Mat(1, 1, CV_8UC1), Point(-1, -1)); redCount = processImgR(imgRed); greenCount = processImgG(imgGreen); cout << "red:" << redCount << "; " << "green:" << greenCount << endl; if(redCount == 0 && greenCount == 0) { cv::putText(frame, "lights out", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(255, 255, 255), 8, 8, 0); }else if(redCount > greenCount) { cv::putText(frame, "red light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 8, 8, 0); }else{ cv::putText(frame, "green light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 255, 0), 8, 8, 0); } imshow("video", frame); imshow("Red", imgRed); imshow("Green", imgGreen); // Handle with the keyboard input if (cvWaitKey(20) == 'q') break; } return 0;}int processImgR(Mat src){ Mat tmp; vector<vector<Point>> contours; vector<Vec4i> hierarchy; vector<Point> hull; CvPoint2D32f tempNode; CvMemStorage* storage = cvCreateMemStorage(); CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage); Rect* trackBox; Rect* result; int resultNum = 0; int area = 0; src.copyTo(tmp); //提取轮廓 findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE); if (contours.size() > 0) { trackBox = new Rect[contours.size()]; result = new Rect[contours.size()]; //确定要跟踪的区域 for (int i = 0; i < contours.size(); i++) { cvClearSeq(pointSeq); // 获取凸包的点集 convexHull(Mat(contours[i]), hull, true); int hullcount = (int)hull.size(); // 凸包的保存点 for (int j = 0; j < hullcount - 1; j++) { tempNode.x = hull[j].x; tempNode.y = hull[j].y; cvSeqPush(pointSeq, &tempNode); } trackBox[i] = cvBoundingRect(pointSeq); } if (isFirstDetectedR) { lastTrackBoxR = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) lastTrackBoxR[i] = trackBox[i]; lastTrackNumR = contours.size(); isFirstDetectedR = false; } else { for (int i = 0; i < contours.size(); i++) { for (int j = 0; j < lastTrackNumR; j++) { if (isIntersected(trackBox[i], lastTrackBoxR[j])) { result[resultNum] = trackBox[i]; break; } } resultNum++; } delete[] lastTrackBoxR; lastTrackBoxR = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) { lastTrackBoxR[i] = trackBox[i]; } lastTrackNumR = contours.size(); } delete[] trackBox; } else { isFirstDetectedR = true; result = NULL; } cvReleaseMemStorage(&storage); if (result != NULL) { for (int i = 0; i < resultNum; i++) { area += result[i].area(); } } delete[] result; return area;}int processImgG(Mat src){ Mat tmp; vector<vector<Point> > contours; vector<Vec4i> hierarchy; vector< Point > hull; CvPoint2D32f tempNode; CvMemStorage* storage = cvCreateMemStorage(); CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage); Rect* trackBox; Rect* result; int resultNum = 0; int area = 0; src.copyTo(tmp); //提取轮廓 findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE); if (contours.size() > 0) { trackBox = new Rect[contours.size()]; result = new Rect[contours.size()]; // 确定要跟踪的区域 for (int i = 0; i < contours.size(); i++) { cvClearSeq(pointSeq); // 获取凸包的点集 convexHull(Mat(contours[i]), hull, true); int hullcount = (int)hull.size(); // 保存凸包的点 for (int j = 0; j < hullcount - 1; j++) { tempNode.x = hull[j].x; tempNode.y = hull[j].y; cvSeqPush(pointSeq, &tempNode); } trackBox[i] = cvBoundingRect(pointSeq); } if (isFirstDetectedG) { lastTrackBoxG = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) lastTrackBoxG[i] = trackBox[i]; lastTrackNumG = contours.size(); isFirstDetectedG = false; } else { for (int i = 0; i < contours.size(); i++) { for (int j = 0; j < lastTrackNumG; j++) { if (isIntersected(trackBox[i], lastTrackBoxG[j])) { result[resultNum] = trackBox[i]; break; } } resultNum++; } delete[] lastTrackBoxG; lastTrackBoxG = new Rect[contours.size()]; for (int i = 0; i < contours.size(); i++) { lastTrackBoxG[i] = trackBox[i]; } lastTrackNumG = contours.size(); } delete[] trackBox; } else { isFirstDetectedG = true; result = NULL; } cvReleaseMemStorage(&storage); if (result != NULL) { for (int i = 0; i < resultNum; i++) { area += result[i].area(); } } delete[] result; return area;}//确定两个矩形区域是否相交bool isIntersected(Rect r1, Rect r2){ int minX = max(r1.x, r2.x); int minY = max(r1.y, r2.y); int maxX = min(r1.x + r1.width, r2.x + r2.width); int maxY = min(r1.y + r1.height, r2.y + r2.height); if (minX < maxX && minY < maxY) return true; else return false;}