前言
上一篇我们一起学习了YOLOv5的网络模型之一yolo.py,它这是YOLO的特定模块,而今天要学习另一个和网络搭建有关的文件——common.py,这个文件存放着YOLOv5网络搭建常见的通用模块。如果我们需要修改某一模块,那么就需要修改这个文件中对应模块的定义。
学这篇的同时,搭配【YOLO系列】YOLOv5超详细解读(网络详解)这篇算法详解效果更好噢~
common.py文件位置在./models/common.py
文章代码逐行手打注释,每个模块都有对应讲解,一文帮你梳理整个代码逻辑!
友情提示:全文5万多字,可以先点 再慢慢看哦~
再慢慢看哦~
源码下载地址:mirrors / ultralytics / yolov5 · GitCode
 ?本人YOLOv5源码详解系列:
?本人YOLOv5源码详解系列:
YOLOv5源码逐行超详细注释与解读(1)——项目目录结构解析
YOLOv5源码逐行超详细注释与解读(2)——推理部分detect.py
YOLOv5源码逐行超详细注释与解读(3)——训练部分train.py
YOLOv5源码逐行超详细注释与解读(4)——验证部分val(test).py
YOLOv5源码逐行超详细注释与解读(5)——配置文件yolov5s.yaml
YOLOv5源码逐行超详细注释与解读(6)——网络结构(1)yolo.py
目录
前言
目录
?一、 导包和基本配置
1.1 导入安装好的python库
1.2 加载自定义模块
?二、 基础组件
2.1 autopad
2.2 Conv
2.3 DWConv
2.4 Bottleneck
2.5 BottleneckCSP
2.6 C3
2.6.1 C3
2.6.2 C3SPP(C3)
2.6.3 C3Ghost(C3)
2.7 SPP
2.7.1 SPP
2.7.2 SPPF
2.8 Focus
2.9 Contract
2.10 Expand
2.11 Concat
?三、注意力模块
3.1 TransformerLayer
3.2 TransformerBlock
?四、幻象模块
4.1 GhostConv
4.2 GhostBottleneck
?五、模型扩展模块
5.1 C3TR(C3)
5.2 AutoShape
5.3 Detections
5.4 Classify
?六、common.py全部注释

?一、 导包和基本配置
1.1 导入安装好的python库
'''======================1.导入安装好的python库====================='''import json # 用于json和Python数据之间的相互转换import math # 数学函数模块import platform # 获取操作系统的信息import warnings # 警告程序员关于语言或库功能的变化的方法from copy import copy # 数据拷贝模块 分浅拷贝和深拷贝from pathlib import Path # Path将str转换为Path对象 使字符串路径易于操作的模块import cv2 # 调用OpenCV的cv库import numpy as np # numpy数组操作模块import pandas as pd # panda数组操作模块import requests # Python的HTTP客户端库import torch # pytorch深度学习框架import torch.nn as nn # 专门为神经网络设计的模块化接口from PIL import Image # 图像基础操作模块from torch.cuda import amp # 混合精度训练模块首先,导入一下常用的python库:
json: 实现字典列表和JSON字符串之间的相互解析math: 数学函数模块platform: 获取操作系统的信息warnings: 警告程序员关于语言或库功能的变化的方法 copy: 数据拷贝模块 分浅拷贝和深拷贝pathlib: 这个库提供了一种面向对象的方式来与文件系统交互,可以让代码更简洁、更易读然后再导入一些 pytorch库:
cv2: 调用OpenCV的cv库numpy: 科学计算库,提供了矩阵,线性代数,傅立叶变换等等的解决方案,最常用的是它的N维数组对象pandas: panda数组操作模块requests: Python的HTTP客户端库torch: 这是主要的Pytorch库。它提供了构建、训练和评估神经网络的工具torch.nn: torch下包含用于搭建神经网络的modules和可用于继承的类的一个子包PIL: 图像基础操作模块torch.cuda: 自动混合精度训练 —— 节省显存并加快推理速度1.2 加载自定义模块
'''===================2.加载自定义模块============================'''from utils.datasets import exif_transpose, letterbox # 加载数据集的函数from utils.general import (LOGGER, check_requirements, check_suffix, colorstr, increment_path, make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh) # 定义了一些常用的工具函数from utils.plots import Annotator, colors, plot_one_box # 定义了Annotator类,可以在图像上绘制矩形框和标注信息from utils.torch_utils import time_sync # 定义了一些与PyTorch有关的工具函数这些都是用户自定义的库,由于上一步已经把路径加载上了,所以现在可以导入,这个顺序不可以调换。具体来说,代码从如下几个文件中导入了部分函数和类:
utils.datasets: 加载数据集的函数utils.general: 定义了一些常用的工具函数,比如检查文件是否存在、检查图像大小是否符合要求、打印命令行参数等等utils.plots: 定义了Annotator类,可以在图像上绘制矩形框和标注信息utils.torch_utils: 定义了一些与PyTorch有关的工具函数,比如选择设备、同步时间等通过导入这些模块,可以更方便地进行目标检测的相关任务,并且减少了代码的复杂度和冗余?二、 基础组件
2.1 autopad
'''===========1.autopad:根据输入的卷积核计算该卷积模块所需的pad值================'''# 为same卷积或者same池化自动扩充# 通过卷积核的大小来计算需要的padding为多少才能把tensor补成原来的形状def autopad(k, p=None): # kernel, padding # 如果p是none 则进行下一步 if p is None: # 如果k是int 则进行k//2 若不是则进行x//2 p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad return pautopad主要作用是根据输入的卷积核计算需要的padding为多少才能把tensor补成原来的形状
参数:
k: 卷积核的kernel_sizep: 计算的需要pad值(0填充)这里首先是判断是否有p值:
如果有既定的 p ,则直接 return p,自动计算所需要的pad值如果无设定的 p,则 return 使图像在卷积操作后尺寸不变的 p2.2 Conv
'''===========2.Conv:标准卷积 由Conv + BN + activate组成================'''class Conv(nn.Module): # Standard convolution # init初始化构造函数 def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups super().__init__() # 卷积层 self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False) # 归一化层 self.bn = nn.BatchNorm2d(c2) # 激活函数 self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity()) # 正向计算,网络执行的顺序是根据forward函数来决定的 def forward(self, x): # conv卷积 -> bn -> act激活 return self.act(self.bn(self.conv(x))) # 正向融合计算 def forward_fuse(self, x): # 这里只有卷积和激活 return self.act(self.conv(x))Conv是标准卷积层函数,是整个网络中最核心的模块,由卷积层 + BN层 + 激活函数 组成。
主要作用是实现了将输入特征经过卷积层,激活函数,归一化层,得到输出层。同时可以指定是否使用归一化层。
具体结构如下图:

参数:
c1: 输入的channel值c2: 输出的channel值k: 卷积的kernel_size,k=1s: 卷积的stride,s=1p: 卷积的padding ,一般是None ,可以通过autopad自行计算需要pad的padding数autopad(k,p): 此处换成自动填充g: g=1表示从输入通道到输出通道的阻塞连接数为1act: 激活函数类型,True就是SiLU()/Swish,False就是不使用激活函数,类型是nn.Module就使用传进来的激活函数类型注意,这个类中还有一个特殊函数 fuseforward ,这是一个前向加速推理模块,在前向传播过程中,通过融合conv + bn层,达到加速推理的作用,一般用于测试或验证阶段。
nn.Conv2d函数基本参数:
nn.Conv2d(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
2.3 DWConv
'''===========3.DWConv:深度可分离卷积================'''class DWConv(Conv): # Depth-wise convolution class def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)DWConv是GCONV的极端情况,深度分离(DepthWise)卷积层
分组数量等于输入通道数量,即每个通道作为一个小组分别进行卷积,结果联结作为输出,Cin = Cout = g,没有bias项。
主要作用是将通道按输入输出的最大公约数进行切分,在不同的通道图层上进行特征学习深度分离卷积层,不用深入研究,因为在yolov5中没有真正的使用~
具体结构如下图:
参数
c1: 输入的channel值c2: 输出的channel值k: 卷积的kernel_size,k=1s: 卷积的stride,s=1act: 激活函数类型,True就是SiLU()/Swish,False就是不使用激活函数,类型是nn.Module就使用传进来的激活函数类型2.4 Bottleneck
'''===========4.Bottleneck:标准的瓶颈层 由1x1conv+3x3conv+残差块组成================'''class Bottleneck(nn.Module): # Standard bottleneck def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion super().__init__() c_ = int(c2 * e) # hidden channels # 1*1卷积层 self.cv1 = Conv(c1, c_, 1, 1) # 3*3卷积层 self.cv2 = Conv(c_, c2, 3, 1, g=g) # 如果shortcut为True就会将输入和输出相加之后再输出 self.add = shortcut and c1 == c2 def forward(self, x): return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))Bottleneck是一个标准的瓶颈层,由一些 1x1conv、3x3conv、残差块组成。
具体结构如下图:
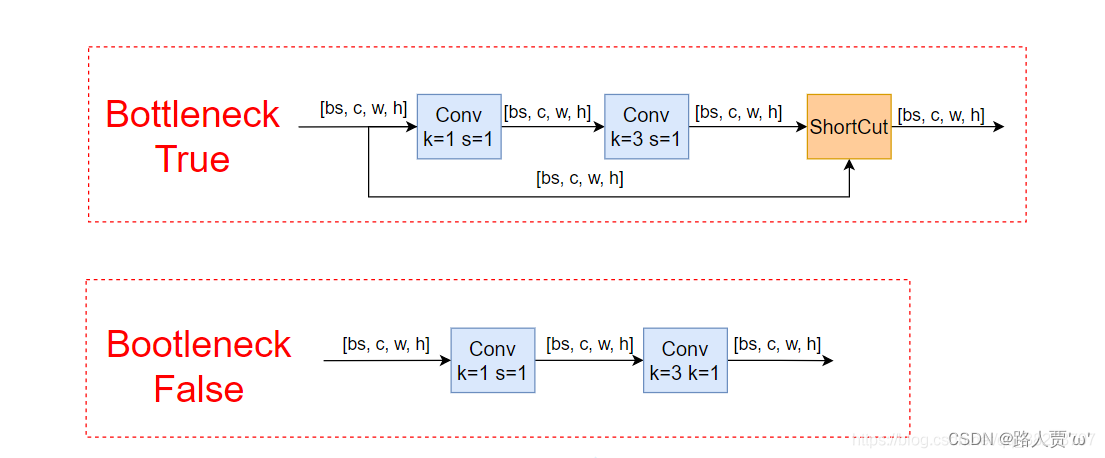
我们可以通过上图看出,网络架构中的Bottleneck模块分为True和False。主要作用是可以更加有效的提取特征,既减少了参数量,又优化了计算,保持了原有的精度。
首先Bottleneck先进行1x1卷积降维,再进行常规3×3卷积核的卷积。最后通过残差结构连接在一起。
参数:
c1: 第一个卷积的输入channelc2: 第二个卷积的输出channelshortcut: bool 是否有shortcut连接 默认是Trueg: 表示从输入通道到输出通道的阻塞连接数为1e: expansion ratio e*c2就是第一个卷积的输出channel=第二个卷积的输入channel模型结构:
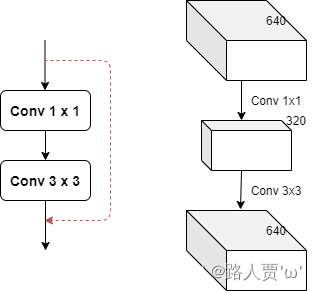
通过上面瓶颈层的模型结构,我们可以看到瓶颈主要体现在通道数channel上面。
图中的红色虚线是shortcut,这里使用的shortcut成为identity分支,可以理解为恒等映射,另一个分支被称为残差分支(Residual分支)。
我们常使用的残差分支实际上是1x1+3x3+1x1的结构
2.5 BottleneckCSP
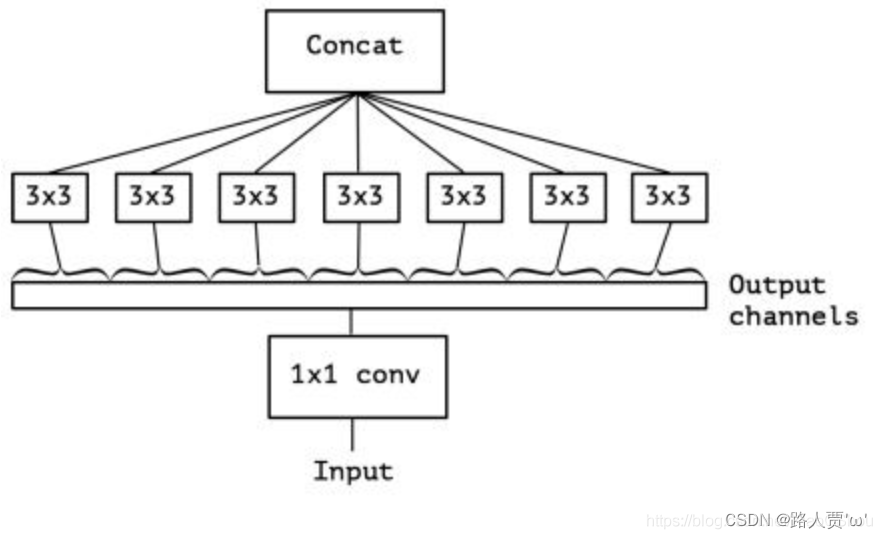
'''===========5.BottleneckCSP:瓶颈层 由几个Bottleneck模块的堆叠+CSP结构组成================'''class BottleneckCSP(nn.Module): # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion super().__init__() c_ = int(c2 * e) # hidden channels # 4个1*1卷积层的堆叠 self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False) self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False) self.cv4 = Conv(2 * c_, c2, 1, 1) # bn层 self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3) # 激活函数 self.act = nn.SiLU() # m:叠加n次Bottleneck的操作 # 操作符*可以把一个list拆开成一个个独立的元素 self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n))) def forward(self, x): # y1相当于先做一次cv1操作然后进行m操作最后进行cv3操作,也就是BCSPn模块中的上面的分支操作 # 输入x ->Conv模块 ->n个bottleneck模块 ->Conv模块 ->y1 y1 = self.cv3(self.m(self.cv1(x))) # y2就是进行cv2操作,也就是BCSPn模块中的下面的分支操作(直接逆行conv操作的分支, Conv--nXBottleneck--conv) # 输入x -> Conv模块 -> 输出y2 y2 = self.cv2(x) # 最后y1和y2做拼接, 接着进入bn层做归一化, 然后做act激活, 最后输出cv4 # 输入y1,y2->按照通道数融合 ->归一化 -> 激活函数 -> Conv输出 -> 输出 # torch.cat(y1, y2), dim=1: 这里是指定在第一个维度上进行合并,即在channel维度上合并 return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))BottleneckCSP也是瓶颈层,由Bottleneck模块和CSP结构组成
具体结构如下图:
 由上图可以看出BottleneckCSP中cv2和cv3调用的是系统的卷积层,使用concat连接之后,加上BN层和激活函数。
由上图可以看出BottleneckCSP中cv2和cv3调用的是系统的卷积层,使用concat连接之后,加上BN层和激活函数。
CSP结构主要思想是在输入block(如Bottleneck)之前,将输入分为两个部分,其中一部分通过block进行计算,另一部分直接通过一个带卷积shortcut进行concat。
主要作用是加强CNN的学习能力、减少内存消耗,减少计算瓶颈,现在的网络大多计算代价昂贵,不利于工业的落地。
参数:
c1: 整个BottleneckCSP的输入channelc2: 整个BottleneckCSP的输出channeln: 有n个Bottleneckg: g=1,表示从输入通道到输出通道的阻塞连接数为1e: expansion ratio c2xe=中间其他所有层的卷积核个数/中间所有层的输入输出channel数torch.cat((y1, y2), dim=1): 这里是指定在第11个维度上进行合并,即在channel维度上合并c_: bottleneckCSP 结构的中间层的通道数,由膨胀率e决定模型结构:
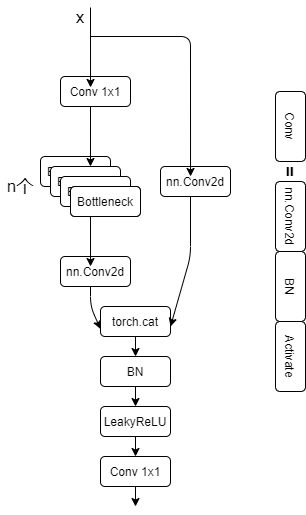
CSP瓶颈层结构在Bottleneck部分存在一个可修改的参数n,标识使用的Bottleneck结构个数。这一条也是我们的主分支,是对残差进行学习的主要结构(这里没有实现DenseNet,可选的有卷积块,transformer块、Ghost块),右侧分支nn.Conv2d实际上是shortcut分支实现不同stage的连接(CSP的思想实现)。
2.6 C3
2.6.1 C3
'''===========6.C3:和BottleneckCSP模块类似,但是少了一个Conv模块================'''# ===6.1 C3=== #class C3(nn.Module): # CSP Bottleneck with 3 convolutions def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion super().__init__() c_ = int(c2 * e) # hidden channels # 3个1*1卷积层的堆叠,比BottleneckCSP少一个 self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c1, c_, 1, 1) self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2) self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n))) # self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)]) def forward(self, x): # 将第一个卷积层与第二个卷积层的结果拼接在一起 return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))C3是一种简化版的BottleneckCSP,模块和BottleneckCSP模块类似,但是少了一个Conv模块,只有3个卷积,可以减少参数,所以取名C3。其实结构是一样的,写法略微有差异。
BottleneckCSP中cv2和cv3调用的是系统的卷积层,使用concat连接之后加上BN层和激活函数;C3则直接使用了作者自己定义的卷积层(conv+batchnorm+SiLU),这里激活函数也有修改。
具体结构如下图:
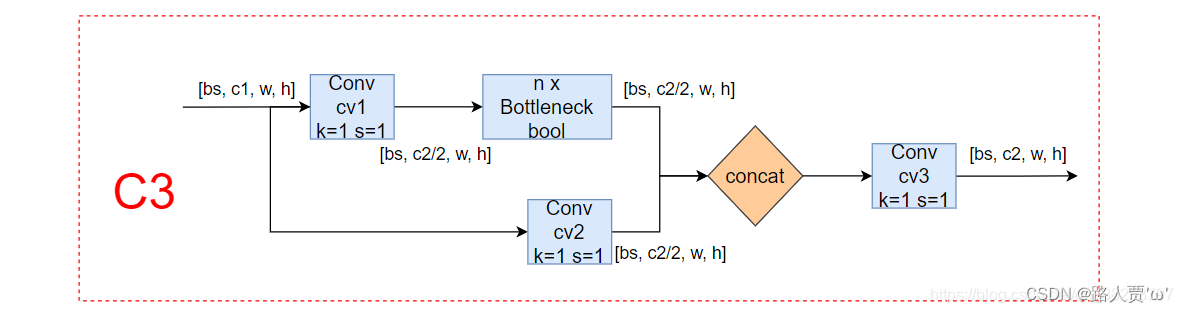
参数:
c1: 整个BottleneckCSP的输入channelc2: 整个BottleneckCSP的输出channeln: 有n个Bottleneckshortcut: bool Bottleneck中是否有shortcut,默认Trueg: g=1,表示从输入通道到输出通道的阻塞连接数为1e: expansion ratio c2xe=中间其他所有层的卷积核个数/中间所有层的输入输出channel数2.6.2 C3SPP(C3)
# ===6.2 C3SPP(C3):继承自 C3,n 个 Bottleneck 更换为 1 个 SPP=== #class C3SPP(C3): # C3 module with SPP() def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) self.m = SPP(c_, c_, k)C3SPP(C3):继承自 C3,将n 个 Bottleneck 更换为 1 个 SPP
参数和上面一样,不再细讲~
2.6.3 C3Ghost(C3)
# ===6.3 C3Ghost(C3):继承自 C3,Bottleneck 更换为 GhostBottleneck=== #class C3Ghost(C3): # C3 module with GhostBottleneck() def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) # hidden channels self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))C3Ghost(C3):继承自 C3,将Bottleneck 更换为 GhostBottleneck
参数和上面一样,不再细讲~
2.7 SPP
2.7.1 SPP
'''===========7.SPP:空间金字塔池化模块================'''# ===7.1 SPP:空间金字塔池化=== #class SPP(nn.Module): # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729 def __init__(self, c1, c2, k=(5, 9, 13)): super().__init__() c_ = c1 // 2 # hidden channels # 1*1卷积 self.cv1 = Conv(c1, c_, 1, 1) # 这里+1是因为有len(k)+1个输入 self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1) # m先进行最大池化操作, 然后通过nn.ModuleList进行构造一个模块 在构造时对每一个k都要进行最大池化 self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k]) def forward(self, x): # 先进行cv1的操作 x = self.cv1(x) # 忽略了警告错误的输出 with warnings.catch_warnings(): warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning # 对每一个m进行最大池化 和没有做池化的每一个输入进行叠加 然后做拼接 最后做cv2操作 return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))SPP 是空间金字塔池化的缩写。用在骨干网络收尾阶段,用于融合多尺度特征。
SPP模块是何恺明等大佬提出来的,非常经典从yolov3中开始使用到现在,yolo系列基本上都用到了。这个模块的主要作用是为了将更多不同分辨率的特征进行融合,得到更多的信息。
具体结构如下图:
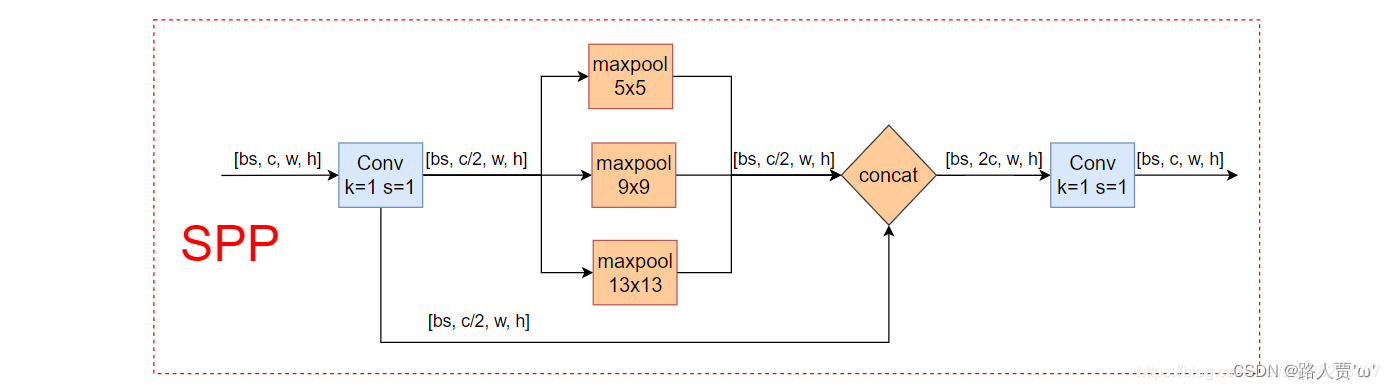
参数:
c1: SPP模块的输入channelc2: SPP模块的输出channelk: 保存着三个maxpool的卷积核大小 默认是(5, 9, 13)2.7.2 SPPF
# ===7.2 SPPF:快速版的空间金字塔池化=== #class SPPF(nn.Module): # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13)) super().__init__() c_ = c1 // 2 # hidden channels self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c_ * 4, c2, 1, 1) self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2) def forward(self, x): x = self.cv1(x) with warnings.catch_warnings(): warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning y1 = self.m(x) y2 = self.m(y1) return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))SPPF是快速版的空间金字塔池化
池化尺寸等价于:5、9、13,和原来一样,但是运算量从原来的  减少到了
减少到了 
(YOLOv5中SPP和SPPF可以看这篇:YOLOv5中的SPP/SPPF结构详解_tt丫的博客-CSDN博客)
2.8 Focus
'''===========8.Focus:把宽度w和高度h的信息整合到c空间================'''class Focus(nn.Module): # Focus wh information into c-space def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups super().__init__() # concat后的卷积(最后的卷积) self.conv = Conv(c1 * 4, c2, k, s, p, g, act) # self.contract = Contract(gain=2) def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2) # 先进行切分, 然后进行拼接, 最后再做conv操作 return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)) # return self.conv(self.contract(x)) # 以下模块Contract,Expand,Concat是用来处理输入特征的shape的Focus是YOLOv5作者自己设计的一个模块,用在了模型的一开始,作用是把宽度w和高度h的信息整合到c空间。
具体结构如下图:
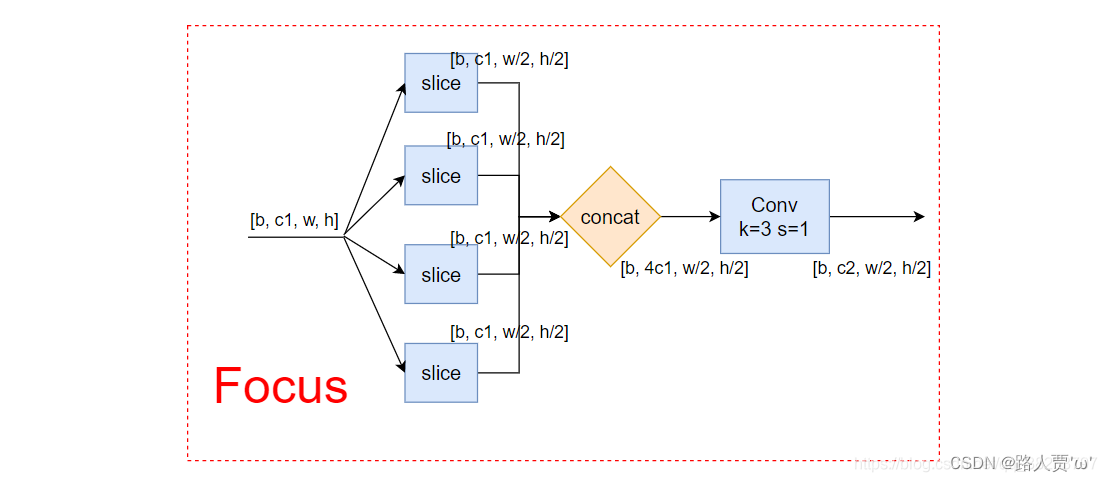
参数:
c1: slice后的channelc2: Focus最终输出的channelk: 最后卷积的kernel,k=1s: 最后卷积的stride,s=1p: 最后卷积的paddingg: g=1,表示从输入通道到输出通道的阻塞连接数为1act: bool激活函数类型 默认True:SiLU()/Swish False:不用激活函数主要思想:
Focus模块在YOLOv5中是图片进入Backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长得差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
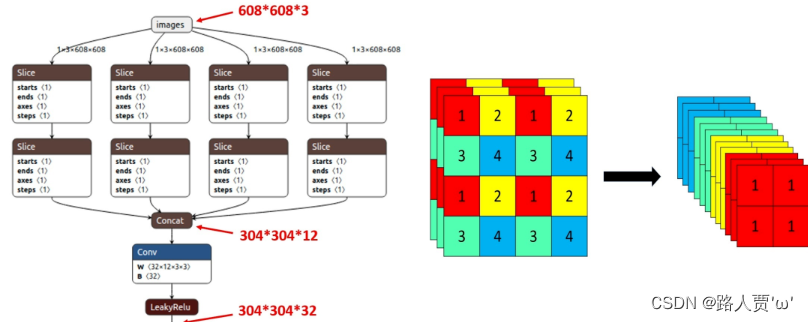
步骤:
首先把输入x分别从(0,0)、(1,0)、(0,1)、(1,1)开始,按步长为2取值,然后进行一次卷积。
然后将输入(b,c,w,h)的shape变成了输出(b, 4c, w/2, h/2)。也就是说将特征层的长和宽都缩减为原来的一半,然后通道数变成原来的4倍,也可以理解成将一个图片等分切成4个,接着将这四个小的上下堆叠起来。
最后再经过一个conv输出。
2.9 Contract
'''===========9.Contract:收缩模块:调整张量的大小,将宽高收缩到通道中。================'''class Contract(nn.Module): # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40) def __init__(self, gain=2): super().__init__() self.gain = gain def forward(self, x): b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain' s = self.gain # permute: 改变tensor的维度顺序 x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2) # .view: 改变tensor的维度 x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40) return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)Contract是收缩模块,调整张量的大小,将宽高收缩到通道中。
将feature map的w和h维度(缩小)的数据收缩到channel维度上(放大)
如:当 gain = 2 的时候,(64, 80, 80) 的图像 -> (256, 40, 40) 的图像。其操作类似 Focus,但更灵活,相比之下少了一个卷积。
2.10 Expand
'''===========10.Expand:扩张模块,将特征图像素变大================'''class Expand(nn.Module): # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160) def __init__(self, gain=2): super().__init__() self.gain = gain def forward(self, x): b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain' s = self.gain x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80) x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2) return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)Expand是Contract的逆操作,扩张模块,将特征图像素变大。
改变输入特征的shape,是将channel维度(变小)的数据扩展到 W 和 H 维度(变大)。
如:当 gain = 2 的时候,(1,64,80,80) 的图像 -> (1,16,160,160) 的图像。
2.11 Concat
'''===========11.Concat:自定义concat模块,dimension就是维度值,说明沿着哪一个维度进行拼接================'''# 作拼接的一个类# 拼接函数,将两个tensor进行拼接class Concat(nn.Module): # Concatenate a list of tensors along dimension def __init__(self, dimension=1): super().__init__() self.d = dimension def forward(self, x): return torch.cat(x, self.d)Concat是拼接函数,将两个tensor进行拼接起来。
这个是自定义concat模块,dimension就是维度值,说明沿着哪一个维度进行拼接。当 dimension = 1 时,将多张相同尺寸的图像在通道维度上拼接 (通道数可能不同)
这个函数是讲自身按照某个维度进行concat,常用来合并前后两个feature map,也就是yolov5s结构图中的Concat。
?三、注意力模块
关于transformer这个我还没有学习,所以这一块内容暂不做详解,等我后期学过再来填这个坑吧~
这里先放代码,小伙伴们自己看看吧!
3.1 TransformerLayer
'''===========1.TransformerLayer:================'''class TransformerLayer(nn.Module): # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance) """ Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance) 这部分相当于原论文中的单个Encoder部分(只移除了两个Norm部分, 其他结构和原文中的Encoding一模一样) """ def __init__(self, c, num_heads): super().__init__() self.q = nn.Linear(c, c, bias=False) self.k = nn.Linear(c, c, bias=False) self.v = nn.Linear(c, c, bias=False) # 输入: query、key、value # 输出: 0 attn_output 即通过self-attention之后,从每一个词语位置输出来的attention 和输入的query它们形状一样的 # 1 attn_output_weights 即attention weights 每一个单词和任意另一个单词之间都会产生一个weight self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads) self.fc1 = nn.Linear(c, c, bias=False) self.fc2 = nn.Linear(c, c, bias=False) def forward(self, x): # 多头注意力机制 + 残差(这里移除了LayerNorm for better performance) x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x # feed forward 前馈神经网络 + 残差(这里移除了LayerNorm for better performance) x = self.fc2(self.fc1(x)) + x return x3.2 TransformerBlock
'''===========2.TransformerBlock:================'''class TransformerBlock(nn.Module): # Vision Transformer https://arxiv.org/abs/2010.11929 def __init__(self, c1, c2, num_heads, num_layers): super().__init__() self.conv = None if c1 != c2: self.conv = Conv(c1, c2) self.linear = nn.Linear(c2, c2) # learnable position embedding self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers))) self.c2 = c2 def forward(self, x): if self.conv is not None: x = self.conv(x) b, _, w, h = x.shape p = x.flatten(2).permute(2, 0, 1) return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)?四、幻象模块
4.1 GhostConv
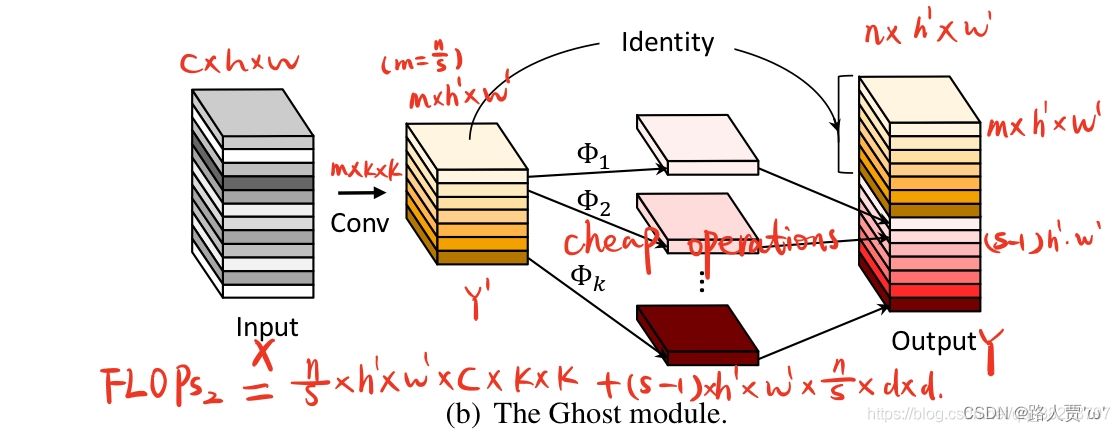
'''===========1.GhostConv:幻象卷积 轻量化网络卷积模块================'''class GhostConv(nn.Module): # Ghost Convolution https://github.com/huawei-noah/ghostnet def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups super().__init__() c_ = c2 // 2 # hidden channels # 第一步卷积: 少量卷积, 一般是一半的计算量 self.cv1 = Conv(c1, c_, k, s, None, g, act) # 第二步卷积: cheap operations 使用3x3或5x5的卷积, 并且是逐个特征图的进行卷积(Depth-wise convolutional self.cv2 = Conv(c_, c_, 5, 1, None, c_, act) def forward(self, x): y = self.cv1(x) return torch.cat([y, self.cv2(y)], 1)GhostConv是幻象卷积,属于轻量化网络卷积模块
具体结构如下图:
参数:
c1: 输入的channel值c2: 输出的channel值k: 卷积的kernel_size,k=1s: 卷积的stride,s=1g: g=1表示从输入通道到输出通道的阻塞连接数为1act: 激活函数类型,True就是SiLU()/Swish,False就是不使用激活函数,类型是nn.Module就使用传进来的激活函数类型GhostConv主要作用是可以代替一般的Conv,GhostBottleneck代替C3,至于在哪些位置代替,可以自己决定。幻象模块虽然不能增加mAP,但是可以大大减少模型计算量。
4.2 GhostBottleneck
'''===========2.GhostBottleneck:幻象瓶颈层 ================'''class GhostBottleneck(nn.Module): # Ghost Bottleneck https://github.com/huawei-noah/ghostnet def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride super().__init__() c_ = c2 // 2 self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw GhostConv(c_, c2, 1, 1, act=False)) # pw-linear # 注意, 源码中并不是直接Identity连接, 而是先经过一个DWConv + Conv, 再进行shortcut连接的。 self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity() def forward(self, x): return self.conv(x) + self.shortcut(x)GhostBottleneck顾名思义就是幻象模块的瓶颈层。
参数:
c1: 输入的channel值c2: 输出的channel值k: 卷积的kernel_size,k=3s: 卷积的stride,s=1具体结构如下图:
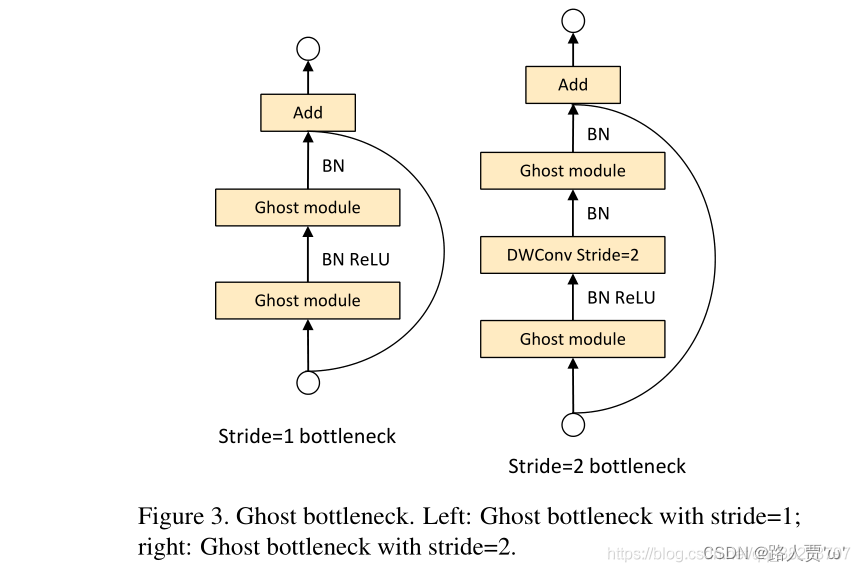
这是一个可复用模块,我们可以放到现有的网络中替换掉Bottleneck模块,从而减少计算了,降低模型体积。类似于ResNet中的基本残差块,由两个堆叠的Ghost模块组成:
第一个Ghost模块用作扩展层,增加了通道数。这里将输出通道数与输入通道数之比称为expansion ratio。第二个Ghost模块减少通道数,以与shortcut路径匹配。然后,使用shortcut连接这两个Ghost模块的输入和输出。第二个Ghost 模块不使用ReLU其他层在每层之后都应用了批量归一化(BN)和ReLu激活函数(主要借鉴了MobileNetV2的思想)Ghost Bottleneck中对于stride = 2的情况,两个Ghost module之间通过一个stride = 2的深度卷积进行连接。
(这个内容以后也会等学习后再详细说,这里参考:[目标检测]-cv常用模块ghostbottleneck原理讲解与pytorch实现_orangezs的博客-CSDN博客)
?五、模型扩展模块
5.1 C3TR(C3)
'''===========1.C3TR(C3):继承自 C3,n 个 Bottleneck 更换为 1 个 TransformerBlock ================'''class C3TR(C3): # C3 module with TransformerBlock() def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) self.m = TransformerBlock(c_, c_, 4, n)C3TR(C3)是继承自 C3,将n 个 Bottleneck 更换为 1 个 TransformerBlock
这部分是根据上面的C3结构改编而来的,将原先的Bottleneck替换为调用TransformerBlock模块
参数:
5.2 AutoShape
'''===========2.AutoShape:自动调整shape,该类基本未用================'''class AutoShape(nn.Module): # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS conf = 0.25 # NMS confidence threshold iou = 0.45 # NMS IoU threshold classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs multi_label = False # NMS multiple labels per box max_det = 1000 # maximum number of detections per image def __init__(self, model): super().__init__() self.model = model.eval() def autoshape(self): LOGGER.info('AutoShape already enabled, skipping... ') # model already converted to model.autoshape() return self def _apply(self, fn): # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers self = super()._apply(fn) m = self.model.model[-1] # Detect() m.stride = fn(m.stride) m.grid = list(map(fn, m.grid)) if isinstance(m.anchor_grid, list): m.anchor_grid = list(map(fn, m.anchor_grid)) return self @torch.no_grad() def forward(self, imgs, size=640, augment=False, profile=False): # Inference from various sources. For height=640, width=1280, RGB images example inputs are: # file: imgs = 'data/images/zidane.jpg' # str or PosixPath # URI: = 'https://ultralytics.com/images/zidane.jpg' # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3) # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3) # numpy: = np.zeros((640,1280,3)) # HWC # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values) # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images t = [time_sync()] p = next(self.model.parameters()) # for device and type if isinstance(imgs, torch.Tensor): # torch with amp.autocast(enabled=p.device.type != 'cpu'): return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference # Pre-process n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images shape0, shape1, files = [], [], [] # image and inference shapes, filenames for i, im in enumerate(imgs): f = f'image{i}' # filename if isinstance(im, (str, Path)): # filename or uri im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im im = np.asarray(exif_transpose(im)) elif isinstance(im, Image.Image): # PIL Image im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f files.append(Path(f).with_suffix('.jpg').name) if im.shape[0] < 5: # image in CHW im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1) im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input s = im.shape[:2] # HWC shape0.append(s) # image shape g = (size / max(s)) # gain shape1.append([y * g for y in s]) imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad x = np.stack(x, 0) if n > 1 else x[0][None] # stack x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32 t.append(time_sync()) with amp.autocast(enabled=p.device.type != 'cpu'): # Inference y = self.model(x, augment, profile)[0] # forward t.append(time_sync()) # Post-process y = non_max_suppression(y, self.conf, iou_thres=self.iou, classes=self.classes, multi_label=self.multi_label, max_det=self.max_det) # NMS for i in range(n): scale_coords(shape1, y[i][:, :4], shape0[i]) t.append(time_sync()) return Detections(imgs, y, files, t, self.names, x.shape)AutoShape是一个模型扩展模块,给模型封装成包含前处理、推理、后处理的模块(预处理 + 推理 + nms)。
注意Autoshape模块在train中不会被调用,当模型训练结束后,会通过这个模块对图片进行重塑,来方便模型的预测。
因为这个模块基本没啥用,所以不做细讲。
5.3 Detections
'''===========3.Detections:对推理结果进行处理================'''class Detections: # YOLOv5 detections class for inference results """用在AutoShape函数结尾 detections class for YOLOv5 inference results """ def __init__(self, imgs, pred, files, times=None, names=None, shape=None): super().__init__() d = pred[0].device # device gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations # imgs:原图 self.imgs = imgs # list of images as numpy arrays # pred:预测值(xyxy, conf, cls) self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls) # names: 类名 self.names = names # class names # files: 图像文件名 self.files = files # image filenames # xyxy:左上角+右下角格式 self.xyxy = pred # xyxy pixels # xywh:中心点+宽长格式 self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels # xyxyn:xyxy标准化 self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized # xywhn:xywhn标准化 self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized self.n = len(self.pred) # number of images (batch size) self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms) self.s = shape # inference BCHW shape def display(self, pprint=False, show=False, save=False, crop=False, render=False, save_dir=Path('')): crops = [] for i, (im, pred) in enumerate(zip(self.imgs, self.pred)): s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string if pred.shape[0]: for c in pred[:, -1].unique(): n = (pred[:, -1] == c).sum() # detections per class s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string if show or save or render or crop: annotator = Annotator(im, example=str(self.names)) for *box, conf, cls in reversed(pred): # xyxy, confidence, class label = f'{self.names[int(cls)]} {conf:.2f}' if crop: file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None crops.append({'box': box, 'conf': conf, 'cls': cls, 'label': label, 'im': save_one_box(box, im, file=file, save=save)}) else: # all others annotator.box_label(box, label, color=colors(cls)) im = annotator.im else: s += '(no detections)' im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np if pprint: LOGGER.info(s.rstrip(', ')) if show: im.show(self.files[i]) # show if save: f = self.files[i] im.save(save_dir / f) # save if i == self.n - 1: LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}") if render: self.imgs[i] = np.asarray(im) if crop: if save: LOGGER.info(f'Saved results to {save_dir}\n') return crops def print(self): self.display(pprint=True) # print results LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t) def show(self): self.display(show=True) # show results def save(self, save_dir='runs/detect/exp'): save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir self.display(save=True, save_dir=save_dir) # save results def crop(self, save=True, save_dir='runs/detect/exp'): save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None return self.display(crop=True, save=save, save_dir=save_dir) # crop results def render(self): self.display(render=True) # render results return self.imgs def pandas(self): # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0]) new = copy(self) # return copy ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]): a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update setattr(new, k, [pd.DataFrame(x, columns=c) for x in a]) return new def tolist(self): # return a list of Detections objects, i.e. 'for result in results.tolist():' x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)] for d in x: for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']: setattr(d, k, getattr(d, k)[0]) # pop out of list return x def __len__(self): return self.nDetections是专门针对目标检测的封装类,对推理结果进行处理。
这个模块吧,代码so长。是对推理结果进行一些处理,用的不是很多,整个YOLOv5只在上面的AutoShape函数结尾调用了一下。不用仔细研究的,把yolo.py的Detect模块了解清楚既可~
5.4 Classify
'''===========4.Classify:二级分类模块================'''class Classify(nn.Module): # Classification head, i.e. x(b,c1,20,20) to x(b,c2) def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups super().__init__() self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1) # 自适应平均池化操作 self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1) # 展平 self.flat = nn.Flatten() def forward(self, x): # 先自适应平均池化操作, 然后拼接 z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list # 对z进行展平操作 return self.flat(self.conv(z)) # flatten to x(b,c2)Classify是一个二级分类模块
什么是二级分类模块?
比如做车牌的识别,先识别出车牌,如果想对车牌上的字进行识别,就需要二级分类进一步检测。
再比如要做识别人脸面部表情,先要识别出人脸,如果想识别出人的面部表情,就需要二级分类进一步检测。
?六、common.py全部注释
# YOLOv5 ? by Ultralytics, GPL-3.0 license"""Common modules"""'''===============================================一、导入包===================================================''''''======================1.导入安装好的python库====================='''import json # 用于json和Python数据之间的相互转换import math # 数学函数模块import platform # 获取操作系统的信息import warnings # 警告程序员关于语言或库功能的变化的方法from copy import copy # 数据拷贝模块 分浅拷贝和深拷贝from pathlib import Path # Path将str转换为Path对象 使字符串路径易于操作的模块import cv2 # 调用OpenCV的cv库import numpy as np # numpy数组操作模块import pandas as pd # panda数组操作模块import requests # Python的HTTP客户端库import torch # pytorch深度学习框架import torch.nn as nn # 专门为神经网络设计的模块化接口from PIL import Image # 图像基础操作模块from torch.cuda import amp # 混合精度训练模块'''===================2.加载自定义模块============================'''from utils.datasets import exif_transpose, letterbox # 加载数据集的函数from utils.general import (LOGGER, check_requirements, check_suffix, colorstr, increment_path, make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh) # 定义了一些常用的工具函数from utils.plots import Annotator, colors, plot_one_box # 定义了Annotator类,可以在图像上绘制矩形框和标注信息from utils.torch_utils import time_sync # 定义了一些与PyTorch有关的工具函数'''===============================================二、基础组件===================================================''''''===========1.autopad:根据输入的卷积核计算该卷积模块所需的pad值================'''# 为same卷积或者same池化自动扩充# 通过卷积核的大小来计算需要的padding为多少才能把tensor补成原来的形状def autopad(k, p=None): # kernel, padding # Pad to 'same' # 如果p是none 则进行下一步 if p is None: # 如果k是int 则进行k//2 若不是则进行x//2 p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad return p'''===========2.Conv:标准卷积 由Conv + BN + activate组成================'''class Conv(nn.Module): # Standard convolution # init初始化构造函数 def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups """在Focus、Bottleneck、BottleneckCSP、C3、SPP、DWConv、TransformerBloc等模块中调用 Standard convolution conv+BN+act :params c1: 输入的channel值 :params c2: 输出的channel值 :params k: 卷积的kernel_size :params s: 卷积的stride :params p: 卷积的padding 一般是None 可以通过autopad自行计算需要pad的padding数 :params g: 卷积的groups数 =1就是普通的卷积 >1就是深度可分离卷积 :params act: 激活函数类型 True就是SiLU()/Swish False就是不使用激活函数 类型是nn.Module就使用传进来的激活函数类型 """ super().__init__() # 卷积层 self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False) # 归一化层 self.bn = nn.BatchNorm2d(c2) # 激活函数 self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity()) # 正向计算,网络执行的顺序是根据forward函数来决定的 def forward(self, x): # conv卷积 -> bn -> act激活 return self.act(self.bn(self.conv(x))) # 正向融合计算 def forward_fuse(self, x): # 这里只有卷积和激活 return self.act(self.conv(x))'''===========3.DWConv:深度可分离卷积================'''class DWConv(Conv): # Depth-wise convolution class def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)'''===========4.Bottleneck:标准的瓶颈层 由1x1conv+3x3conv+残差块组成================'''class Bottleneck(nn.Module): # Standard bottleneck def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion """在BottleneckCSP和yolo.py的parse_model中调用 Standard bottleneck Conv+Conv+shortcut :params c1: 第一个卷积的输入channel :params c2: 第二个卷积的输出channel :params shortcut: bool 是否有shortcut连接 默认是True :params g: 卷积分组的个数 =1就是普通卷积 >1就是深度可分离卷积 :params e: expansion ratio e*c2就是第一个卷积的输出channel=第二个卷积的输入channel """ super().__init__() c_ = int(c2 * e) # hidden channels # 1*1卷积层 self.cv1 = Conv(c1, c_, 1, 1) # 3*3卷积层 self.cv2 = Conv(c_, c2, 3, 1, g=g) # 如果shortcut为True就会将输入和输出相加之后再输出 self.add = shortcut and c1 == c2 def forward(self, x): return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))'''===========5.BottleneckCSP:瓶颈层 由几个Bottleneck模块的堆叠+CSP结构组成================'''class BottleneckCSP(nn.Module): # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion """在C3模块和yolo.py的parse_model模块调用 CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks :params c1: 整个BottleneckCSP的输入channel :params c2: 整个BottleneckCSP的输出channel :params n: 有n个Bottleneck :params shortcut: bool Bottleneck中是否有shortcut,默认True :params g: Bottleneck中的3x3卷积类型 =1普通卷积 >1深度可分离卷积 :params e: expansion ratio c2xe=中间其他所有层的卷积核个数/中间所有层的输入输出channel数 c_: bottleneckCSP 结构的中间层的通道数,由膨胀率e决定 """ super().__init__() c_ = int(c2 * e) # hidden channels # 4个1*1卷积层的堆叠 self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False) self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False) self.cv4 = Conv(2 * c_, c2, 1, 1) # bn层 self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3) # 激活函数 self.act = nn.SiLU() # m:叠加n次Bottleneck的操作 # 操作符*可以把一个list拆开成一个个独立的元素 self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n))) def forward(self, x): # y1相当于先做一次cv1操作然后进行m操作最后进行cv3操作,也就是BCSPn模块中的上面的分支操作 # 输入x ->Conv模块 ->n个bottleneck模块 ->Conv模块 ->y1 y1 = self.cv3(self.m(self.cv1(x))) # y2就是进行cv2操作,也就是BCSPn模块中的下面的分支操作(直接逆行conv操作的分支, Conv--nXBottleneck--conv) # 输入x -> Conv模块 -> 输出y2 y2 = self.cv2(x) # 最后y1和y2做拼接, 接着进入bn层做归一化, 然后做act激活, 最后输出cv4 # 输入y1,y2->按照通道数融合 ->归一化 -> 激活函数 -> Conv输出 -> 输出 # torch.cat(y1, y2), dim=1: 这里是指定在第一个维度上进行合并,即在channel维度上合并 return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))'''===========6.C3:和BottleneckCSP模块类似,但是少了一个Conv模块================'''# ===6.1 C3=== #class C3(nn.Module): # CSP Bottleneck with 3 convolutions def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion """在C3TR模块和yolo.py的parse_model模块调用 CSP Bottleneck with 3 convolutions :params c1: 整个BottleneckCSP的输入channel :params c2: 整个BottleneckCSP的输出channel :params n: 有n个Bottleneck :params shortcut: bool Bottleneck中是否有shortcut,默认True :params g: Bottleneck中的3x3卷积类型 =1普通卷积 >1深度可分离卷积 :params e: expansion ratio c2xe=中间其他所有层的卷积核个数/中间所有层的输入输出channel数 """ super().__init__() c_ = int(c2 * e) # hidden channels # 3个1*1卷积层的堆叠,比BottleneckCSP少一个 self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c1, c_, 1, 1) self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2) self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n))) # self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)]) def forward(self, x): # 将第一个卷积层与第二个卷积层的结果拼接在一起 return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))# ===6.2 C3SPP(C3):继承自 C3,n 个 Bottleneck 更换为 1 个 SPP=== #class C3SPP(C3): # C3 module with SPP() def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) self.m = SPP(c_, c_, k)# ===6.3 C3Ghost(C3):继承自 C3,Bottleneck 更换为 GhostBottleneck=== #class C3Ghost(C3): # C3 module with GhostBottleneck() def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) # hidden channels self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))'''===========7.SPP:空间金字塔池化模块================'''# 用在骨干网络收尾阶段,用于融合多尺度特征。# ===7.1 SPP:空间金字塔池化=== #class SPP(nn.Module): # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729 def __init__(self, c1, c2, k=(5, 9, 13)): """在yolo.py的parse_model模块调用 空间金字塔池化 Spatial pyramid pooling layer used in YOLOv3-SPP :params c1: SPP模块的输入channel :params c2: SPP模块的输出channel :params k: 保存着三个maxpool的卷积核大小 默认是(5, 9, 13) """ super().__init__() c_ = c1 // 2 # hidden channels # 1*1卷积 self.cv1 = Conv(c1, c_, 1, 1) # 这里+1是因为有len(k)+1个输入 self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1) # m先进行最大池化操作, 然后通过nn.ModuleList进行构造一个模块 在构造时对每一个k都要进行最大池化 self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k]) def forward(self, x): # 先进行cv1的操作 x = self.cv1(x) # 忽略了警告错误的输出 with warnings.catch_warnings(): warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning # 对每一个m进行最大池化 和没有做池化的每一个输入进行叠加 然后做拼接 最后做cv2操作 return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))# ===7.2 SPPF:快速版的空间金字塔池化=== #class SPPF(nn.Module): # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13)) super().__init__() c_ = c1 // 2 # hidden channels self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c_ * 4, c2, 1, 1) self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2) def forward(self, x): x = self.cv1(x) with warnings.catch_warnings(): warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning y1 = self.m(x) y2 = self.m(y1) return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))'''===========8.Focus:把宽度w和高度h的信息整合到c空间================'''class Focus(nn.Module): # Focus wh information into c-space def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups """在yolo.py的parse_model函数中被调用 理论:从高分辨率图像中,周期性的抽出像素点重构到低分辨率图像中,即将图像相邻的四个位置进行堆叠, 聚焦wh维度信息到c通道空,提高每个点感受野,并减少原始信息的丢失,该模块的设计主要是减少计算量加快速度。 Focus wh information into c-space 把宽度w和高度h的信息整合到c空间中 先做4个slice 再concat 最后再做Conv slice后 (b,c1,w,h) -> 分成4个slice 每个slice(b,c1,w/2,h/2) concat(dim=1)后 4个slice(b,c1,w/2,h/2)) -> (b,4c1,w/2,h/2) conv后 (b,4c1,w/2,h/2) -> (b,c2,w/2,h/2) :params c1: slice后的channel :params c2: Focus最终输出的channel :params k: 最后卷积的kernel :params s: 最后卷积的stride :params p: 最后卷积的padding :params g: 最后卷积的分组情况 =1普通卷积 >1深度可分离卷积 :params act: bool激活函数类型 默认True:SiLU()/Swish False:不用激活函数 """ super().__init__() # concat后的卷积(最后的卷积) self.conv = Conv(c1 * 4, c2, k, s, p, g, act) # self.contract = Contract(gain=2) def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2) # 先进行切分, 然后进行拼接, 最后再做conv操作 return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)) # return self.conv(self.contract(x)) # 以下模块Contract,Expand,Concat是用来处理输入特征的shape的'''===========9.Contract:收缩模块:调整张量的大小,将宽高收缩到通道中。================'''class Contract(nn.Module): # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40) """用在yolo.py的parse_model模块 用的不多 改变输入特征的shape 将w和h维度(缩小)的数据收缩到channel维度上(放大) Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40) """ def __init__(self, gain=2): super().__init__() self.gain = gain def forward(self, x): b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain' s = self.gain # permute: 改变tensor的维度顺序 x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2) # .view: 改变tensor的维度 x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40) return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)'''===========10.Expand:扩张模块,将特征图像素变大================'''class Expand(nn.Module): # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160) def __init__(self, gain=2): super().__init__() self.gain = gain def forward(self, x): b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain' s = self.gain x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80) x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2) return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)'''===========11.Concat:自定义concat模块,dimension就是维度值,说明沿着哪一个维度进行拼接================'''# 作拼接的一个类# 拼接函数,将两个tensor进行拼接class Concat(nn.Module): # Concatenate a list of tensors along dimension def __init__(self, dimension=1): super().__init__() self.d = dimension def forward(self, x): return torch.cat(x, self.d)'''===============================================三、注意力模块===================================================''''''===========1.TransformerLayer:================'''class TransformerLayer(nn.Module): # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance) """ Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance) 这部分相当于原论文中的单个Encoder部分(只移除了两个Norm部分, 其他结构和原文中的Encoding一模一样) """ def __init__(self, c, num_heads): super().__init__() self.q = nn.Linear(c, c, bias=False) self.k = nn.Linear(c, c, bias=False) self.v = nn.Linear(c, c, bias=False) # 输入: query、key、value # 输出: 0 attn_output 即通过self-attention之后,从每一个词语位置输出来的attention 和输入的query它们形状一样的 # 1 attn_output_weights 即attention weights 每一个单词和任意另一个单词之间都会产生一个weight self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads) self.fc1 = nn.Linear(c, c, bias=False) self.fc2 = nn.Linear(c, c, bias=False) def forward(self, x): # 多头注意力机制 + 残差(这里移除了LayerNorm for better performance) x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x # feed forward 前馈神经网络 + 残差(这里移除了LayerNorm for better performance) x = self.fc2(self.fc1(x)) + x return x'''===========2.TransformerBlock:================'''class TransformerBlock(nn.Module): # Vision Transformer https://arxiv.org/abs/2010.11929 def __init__(self, c1, c2, num_heads, num_layers): super().__init__() self.conv = None if c1 != c2: self.conv = Conv(c1, c2) self.linear = nn.Linear(c2, c2) # learnable position embedding self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers))) self.c2 = c2 def forward(self, x): if self.conv is not None: x = self.conv(x) b, _, w, h = x.shape p = x.flatten(2).permute(2, 0, 1) return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)'''===============================================四、幻象模块===================================================''''''===========1.GhostConv:幻象卷积 轻量化网络卷积模块================'''class GhostConv(nn.Module): # Ghost Convolution https://github.com/huawei-noah/ghostnet def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups super().__init__() c_ = c2 // 2 # hidden channels # 第一步卷积: 少量卷积, 一般是一半的计算量 self.cv1 = Conv(c1, c_, k, s, None, g, act) # 第二步卷积: cheap operations 使用3x3或5x5的卷积, 并且是逐个特征图的进行卷积(Depth-wise convolutional self.cv2 = Conv(c_, c_, 5, 1, None, c_, act) def forward(self, x): y = self.cv1(x) return torch.cat([y, self.cv2(y)], 1)'''===========2.GhostBottleneck:幻象瓶颈层 ================'''class GhostBottleneck(nn.Module): # Ghost Bottleneck https://github.com/huawei-noah/ghostnet def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride super().__init__() c_ = c2 // 2 self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw GhostConv(c_, c2, 1, 1, act=False)) # pw-linear # 注意, 源码中并不是直接Identity连接, 而是先经过一个DWConv + Conv, 再进行shortcut连接的。 self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False), Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity() def forward(self, x): return self.conv(x) + self.shortcut(x)'''===============================================五、模型扩展模块===================================================''''''===========1.C3TR(C3):继承自 C3,n 个 Bottleneck 更换为 1 个 TransformerBlock ================'''class C3TR(C3): """ 这部分是根据上面的C3结构改编而来的, 将原先的Bottleneck替换为调用TransformerBlock模块 """ # C3 module with TransformerBlock() def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): ''' 在C3RT模块和yolo.py的parse_model函数中被调用 :params c1: 整个C3的输入channel :params c2: 整个C3的输出channel :params n: 有n个子模块[Bottleneck/CrossConv] :params shortcut: bool值,子模块[Bottlenec/CrossConv]中是否有shortcut,默认True :params g: 子模块[Bottlenec/CrossConv]中的3x3卷积类型,=1普通卷积,>1深度可分离卷积 :params e: expansion ratio,e*c2=中间其它所有层的卷积核个数=中间所有层的的输入输出channel ''' super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) self.m = TransformerBlock(c_, c_, 4, n)'''===========2.DetectMultiBackend: ================'''class DetectMultiBackend(nn.Module): # YOLOv5 MultiBackend class for python inference on various backends def __init__(self, weights='yolov5s.pt', device=None, dnn=True): # Usage: # PyTorch: weights = *.pt # TorchScript: *.torchscript.pt # CoreML: *.mlmodel # TensorFlow: *_saved_model # TensorFlow: *.pb # TensorFlow Lite: *.tflite # ONNX Runtime: *.onnx # OpenCV DNN: *.onnx with dnn=True super().__init__() # 判断weights是否为list,若是取出第一个值作为传入路径 w = str(weights[0] if isinstance(weights, list) else weights) suffix, suffixes = Path(w).suffix.lower(), ['.pt', '.onnx', '.tflite', '.pb', '', '.mlmodel'] check_suffix(w, suffixes) # check weights have acceptable suffix pt, onnx, tflite, pb, saved_model, coreml = (suffix == x for x in suffixes) # backend booleans jit = pt and 'torchscript' in w.lower() stride, names = 64, [f'class{i}' for i in range(1000)] # assign defaults if jit: # TorchScript LOGGER.info(f'Loading {w} for TorchScript inference...') extra_files = {'config.txt': ''} # model metadata model = torch.jit.load(w, _extra_files=extra_files) if extra_files['config.txt']: d = json.loads(extra_files['config.txt']) # extra_files dict stride, names = int(d['stride']), d['names'] elif pt: # PyTorch from models.experimental import attempt_load # scoped to avoid circular import model = torch.jit.load(w) if 'torchscript' in w else attempt_load(weights, map_location=device) stride = int(model.stride.max()) # model stride names = model.module.names if hasattr(model, 'module') else model.names # get class names elif coreml: # CoreML *.mlmodel import coremltools as ct model = ct.models.MLModel(w) elif dnn: # ONNX OpenCV DNN LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...') check_requirements(('opencv-python>=4.5.4',)) net = cv2.dnn.readNetFromONNX(w) elif onnx: # ONNX Runtime LOGGER.info(f'Loading {w} for ONNX Runtime inference...') check_requirements(('onnx', 'onnxruntime-gpu' if torch.has_cuda else 'onnxruntime')) import onnxruntime session = onnxruntime.InferenceSession(w, None) else: # TensorFlow model (TFLite, pb, saved_model) import tensorflow as tf if pb: # https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt def wrap_frozen_graph(gd, inputs, outputs): x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=""), []) # wrapped return x.prune(tf.nest.map_structure(x.graph.as_graph_element, inputs), tf.nest.map_structure(x.graph.as_graph_element, outputs)) LOGGER.info(f'Loading {w} for TensorFlow *.pb inference...') graph_def = tf.Graph().as_graph_def() graph_def.ParseFromString(open(w, 'rb').read()) frozen_func = wrap_frozen_graph(gd=graph_def, inputs="x:0", outputs="Identity:0") elif saved_model: LOGGER.info(f'Loading {w} for TensorFlow saved_model inference...') model = tf.keras.models.load_model(w) elif tflite: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python if 'edgetpu' in w.lower(): LOGGER.info(f'Loading {w} for TensorFlow Edge TPU inference...') import tflite_runtime.interpreter as tfli delegate = {'Linux': 'libedgetpu.so.1', # install https://coral.ai/software/#edgetpu-runtime 'Darwin': 'libedgetpu.1.dylib', 'Windows': 'edgetpu.dll'}[platform.system()] interpreter = tfli.Interpreter(model_path=w, experimental_delegates=[tfli.load_delegate(delegate)]) else: LOGGER.info(f'Loading {w} for TensorFlow Lite inference...') interpreter = tf.lite.Interpreter(model_path=w) # load TFLite model interpreter.allocate_tensors() # allocate input_details = interpreter.get_input_details() # inputs output_details = interpreter.get_output_details() # outputs self.__dict__.update(locals()) # assign all variables to self def forward(self, im, augment=False, visualize=False, val=False): # YOLOv5 MultiBackend inference b, ch, h, w = im.shape # batch, channel, height, width if self.pt: # PyTorch y = self.model(im) if self.jit else self.model(im, augment=augment, visualize=visualize) return y if val else y[0] elif self.coreml: # CoreML *.mlmodel im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3) im = Image.fromarray((im[0] * 255).astype('uint8')) # im = im.resize((192, 320), Image.ANTIALIAS) y = self.model.predict({'image': im}) # coordinates are xywh normalized box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float) y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1) elif self.onnx: # ONNX im = im.cpu().numpy() # torch to numpy if self.dnn: # ONNX OpenCV DNN self.net.setInput(im) y = self.net.forward() else: # ONNX Runtime y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0] else: # TensorFlow model (TFLite, pb, saved_model) im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3) if self.pb: y = self.frozen_func(x=self.tf.constant(im)).numpy() elif self.saved_model: y = self.model(im, training=False).numpy() elif self.tflite: input, output = self.input_details[0], self.output_details[0] int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model if int8: scale, zero_point = input['quantization'] im = (im / scale + zero_point).astype(np.uint8) # de-scale self.interpreter.set_tensor(input['index'], im) self.interpreter.invoke() y = self.interpreter.get_tensor(output['index']) if int8: scale, zero_point = output['quantization'] y = (y.astype(np.float32) - zero_point) * scale # re-scale y[..., 0] *= w # x y[..., 1] *= h # y y[..., 2] *= w # w y[..., 3] *= h # h y = torch.tensor(y) return (y, []) if val else y'''===========3.AutoShape:自动调整shape,该类基本未用================'''class AutoShape(nn.Module): # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS conf = 0.25 # NMS confidence threshold iou = 0.45 # NMS IoU threshold classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs multi_label = False # NMS multiple labels per box max_det = 1000 # maximum number of detections per image def __init__(self, model): super().__init__() self.model = model.eval() def autoshape(self): LOGGER.info('AutoShape already enabled, skipping... ') # model already converted to model.autoshape() return self def _apply(self, fn): # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers self = super()._apply(fn) m = self.model.model[-1] # Detect() m.stride = fn(m.stride) m.grid = list(map(fn, m.grid)) if isinstance(m.anchor_grid, list): m.anchor_grid = list(map(fn, m.anchor_grid)) return self @torch.no_grad() def forward(self, imgs, size=640, augment=False, profile=False): # Inference from various sources. For height=640, width=1280, RGB images example inputs are: # file: imgs = 'data/images/zidane.jpg' # str or PosixPath # URI: = 'https://ultralytics.com/images/zidane.jpg' # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3) # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3) # numpy: = np.zeros((640,1280,3)) # HWC # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values) # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images t = [time_sync()] p = next(self.model.parameters()) # for device and type if isinstance(imgs, torch.Tensor): # torch with amp.autocast(enabled=p.device.type != 'cpu'): return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference # Pre-process n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images shape0, shape1, files = [], [], [] # image and inference shapes, filenames for i, im in enumerate(imgs): f = f'image{i}' # filename if isinstance(im, (str, Path)): # filename or uri im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im im = np.asarray(exif_transpose(im)) elif isinstance(im, Image.Image): # PIL Image im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f files.append(Path(f).with_suffix('.jpg').name) if im.shape[0] < 5: # image in CHW im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1) im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input s = im.shape[:2] # HWC shape0.append(s) # image shape g = (size / max(s)) # gain shape1.append([y * g for y in s]) imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad x = np.stack(x, 0) if n > 1 else x[0][None] # stack x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32 t.append(time_sync()) with amp.autocast(enabled=p.device.type != 'cpu'): # Inference y = self.model(x, augment, profile)[0] # forward t.append(time_sync()) # Post-process y = non_max_suppression(y, self.conf, iou_thres=self.iou, classes=self.classes, multi_label=self.multi_label, max_det=self.max_det) # NMS for i in range(n): scale_coords(shape1, y[i][:, :4], shape0[i]) t.append(time_sync()) return Detections(imgs, y, files, t, self.names, x.shape)'''===========3.Detections:对推理结果进行处理================'''class Detections: # YOLOv5 detections class for inference results """用在AutoShape函数结尾 detections class for YOLOv5 inference results """ def __init__(self, imgs, pred, files, times=None, names=None, shape=None): super().__init__() d = pred[0].device # device gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations # imgs:原图 self.imgs = imgs # list of images as numpy arrays # pred:预测值(xyxy, conf, cls) self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls) # names: 类名 self.names = names # class names # files: 图像文件名 self.files = files # image filenames # xyxy:左上角+右下角格式 self.xyxy = pred # xyxy pixels # xywh:中心点+宽长格式 self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels # xyxyn:xyxy标准化 self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized # xywhn:xywhn标准化 self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized self.n = len(self.pred) # number of images (batch size) self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms) self.s = shape # inference BCHW shape def display(self, pprint=False, show=False, save=False, crop=False, render=False, save_dir=Path('')): crops = [] for i, (im, pred) in enumerate(zip(self.imgs, self.pred)): s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string if pred.shape[0]: for c in pred[:, -1].unique(): n = (pred[:, -1] == c).sum() # detections per class s += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string if show or save or render or crop: annotator = Annotator(im, example=str(self.names)) for *box, conf, cls in reversed(pred): # xyxy, confidence, class label = f'{self.names[int(cls)]} {conf:.2f}' if crop: file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None crops.append({'box': box, 'conf': conf, 'cls': cls, 'label': label, 'im': save_one_box(box, im, file=file, save=save)}) else: # all others annotator.box_label(box, label, color=colors(cls)) im = annotator.im else: s += '(no detections)' im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np if pprint: LOGGER.info(s.rstrip(', ')) if show: im.show(self.files[i]) # show if save: f = self.files[i] im.save(save_dir / f) # save if i == self.n - 1: LOGGER.info(f"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}") if render: self.imgs[i] = np.asarray(im) if crop: if save: LOGGER.info(f'Saved results to {save_dir}\n') return crops def print(self): self.display(pprint=True) # print results LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t) def show(self): self.display(show=True) # show results def save(self, save_dir='runs/detect/exp'): save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir self.display(save=True, save_dir=save_dir) # save results def crop(self, save=True, save_dir='runs/detect/exp'): save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None return self.display(crop=True, save=save, save_dir=save_dir) # crop results def render(self): self.display(render=True) # render results return self.imgs def pandas(self): # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0]) new = copy(self) # return copy ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]): a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update setattr(new, k, [pd.DataFrame(x, columns=c) for x in a]) return new def tolist(self): # return a list of Detections objects, i.e. 'for result in results.tolist():' x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)] for d in x: for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']: setattr(d, k, getattr(d, k)[0]) # pop out of list return x def __len__(self): return self.n'''===========5.Classify:二级分类模块================'''class Classify(nn.Module): # Classification head, i.e. x(b,c1,20,20) to x(b,c2) def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups """ 这是一个二级分类模块, 什么是二级分类模块? 比如做车牌的识别, 先识别出车牌, 如果想对车牌上的字进行识别, 就需要二级分类进一步检测. 如果对模型输出的分类再进行分类, 就可以用这个模块. 不过这里这个类写的比较简单, 若进行复杂的二级分类, 可以根据自己的实际任务可以改写, 这里代码不唯一. Classification head, i.e. x(b,c1,20,20) to x(b,c2) 用于第二级分类 可以根据自己的任务自己改写,比较简单 比如车牌识别 检测到车牌之后还需要检测车牌在哪里,如果检测到侧拍后还想对车牌上的字再做识别的话就要进行二级分类 """ super().__init__() self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1) # 自适应平均池化操作 self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1) # 展平 self.flat = nn.Flatten() def forward(self, x): # 先自适应平均池化操作, 然后拼接 z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list # 对z进行展平操作 return self.flat(self.conv(z)) # flatten to x(b,c2)本文参考:
【YOLOV5-5.x 源码解读】common.py_满船清梦压星河HK的博客-CSDN博客
yolov5 代码解读 --common.py_XiaoGShou的博客-CSDN博客
