


STL 中有哪些常见的容器
STL 中容器分为顺序容器、关联式容器、容器适配器三种类型,三种类型容器特性分别如下:
1. 顺序容器 容器并非排序的,元素的插入位置同元素的值无关,包含 vector、deque、list
vector:动态数组 元素在内存连续存放。随机存取任何元素都能在常数时间完成。在尾端增删元素具有较佳的性能。deque:双向队列 元素在内存连续存放。随机存取任何元素都能在常数时间完成(仅次于 vector )。在两端增删元素具有较佳的性能(大部分情况下是常数时间)。list:双向链表 元素在内存不连续存放。在任何位置增删元素都能在常数时间完成。不支持随机存取。2. 关联式容器 元素是排序的;插入任何元素,都按相应的排序规则来确定其位置;在查找时具有非常好的性能;通常以平衡二叉树的方式实现,包含set、map。
set set中不允许相同元素map map 与 set 的不同在于 map 中存放的元素有且仅有两个成员变,一个名为 first,另一个名为 second,map 根据 first 值对元素从小到大排序,并可快速地根据 first 来检索元素。3. 容器适配器 封装了一些基本的容器,使之具备了新的函数功能,包含 stack、queue。
stack:栈 栈是项的有限序列,并满足序列中被删除、检索和修改的项只能是最进插入序列的项(栈顶的项),后进先出。queue:队列 插入只可以在尾部进行,删除、检索和修改只允许从头部进行,先进先出。STL 容器用过哪些,查找的时间复杂度是多少,为什么?
以下是其中一些常见容器的查找时间复杂度以及原因:
vector(向量):查找时间复杂度为O(n),因为vector是基于数组实现的,需要线性遍历整个数组来查找元素。
deque(双端队列):在未排序状态下,查找时间复杂度为O(n),类似于vector。但在有序状态下,可以利用二分查找,降低查找时间复杂度为O(log n)。
list(链表):查找时间复杂度为O(n),因为链表是一种线性结构,需要从头开始顺序查找元素。
set(集合)和multiset(多重集合):查找时间复杂度为O(log n),底层通常使用红黑树实现,具有较好的平衡性能。
map(映射)和multimap(多重映射):查找时间复杂度为O(log n),底层通常使用红黑树实现,按键进行自动排序。
stack(栈)和queue(队列):查找时间复杂度为O(n),因为它们是容器适配器,提供了先进先出(FIFO)或后进先出(LIFO)的接口,并不支持快速查找操作。
因此,对于不同的STL容器,其查找时间复杂度取决于底层数据结构的实现方式和算法设计。
vector 和 list 的区别,分别适用于什么场景?
vector 和 list 的区别:
底层数据结构:
vector: 底层使用动态数组实现。list: 底层使用双向链表实现。插入和删除操作:
vector: 插入和删除元素效率低。list: 插入和删除元素效率高,因为只需要修改相邻节点的指针。随机访问:
vector: 支持随机访问,可以通过下标快速访问元素。list: 不支持随机访问,只能通过迭代器顺序访问元素。空间和内存分配:
vector: vector 一次性分配好内存,不够时才进行扩容。list: list 每次插入新节点都会进行内存申请。适用场景:
vector: 适用于连续存储,支持随机访问,而不在乎插入和删除的效率。
list: 适用于不连续的内存空间,如果需要高效的插入和删除,而不关心随机访问。
简述 vector 的实现原理
vector 是一种动态数组,在内存中具有连续的存储空间,支持快速随机访问,由于具有连续的存储空间,所以在插入和删除操作方面,效率比较慢。
当 vector 的大小和容量相等(size==capacity)时,如果再向其添加元素,那么 vector 就需要扩容。vector 容器扩容的过程需要经历以下 3 步:
重新在堆上创建更大的动态数组,大小是原来的2倍;将旧内存空间中的数据,按原有顺序移动到新的内存空间中;最后将旧的内存空间释放。扩容以后它的内存地址会发生改变
迭代器失效原因,有哪些情况
迭代器失效是指迭代器在遍历容器过程中,由于容器的结构发生改变而导致迭代器指向的元素不再有效。
以下是导致迭代器失效的常见情况:
插入和删除操作: 当在容器中插入或删除元素时,可能会导致容器内存重新分配或元素位置的改变,这可能会使迭代器失效。清空容器: 清空容器会使容器内的所有元素被删除,这样迭代器指向的元素就会失效。使用引起重新分配的操作: 例如,在vector中使用push_back()添加元素时,如果超出了当前容量,可能会触发重新分配操作,从而使所有迭代器失效。排序操作: 如果在排序过程中,容器的元素被移动了位置,迭代器可能会失效。 deque 的实现原理
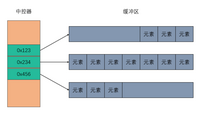
分段连续内存、中控器
deque 是由一段一段的连续空间构成。
deque 采取一块所谓的 map(不是 STL 的 map 容器)作为主控,这里所谓的 map 是一小块连续的内存空间,其中的每个元素(此处成为一个结点)都是一个指针,指向另一段连续的内存空间,称作缓冲区。缓冲区才是 deque的存储空间的主体。
红黑树的特性,为什么要有红黑树
红黑树是一种自平衡的二叉搜索树,它具有以下特性:
节点颜色: 每个节点要么是红色,要么是黑色。根节点和叶子节点: 根节点、叶子节点(NIL节点,即空节点)是黑色的颜色相邻节点规则: 不能有两个相邻的红色节点。从任一节点到其每个叶子的所有路径都包含相同数目的黑色节点。 这保证了红黑树的关键性质:最长路径不超过最短路径的两倍。2. 各操作的时间复杂度 插入: O(logN) 查看: O(logN) 删除: O(logN)
map/Set 实现原理,各操作的时间复杂度是多少
1. map 实现原理 map 内部实现了一个红黑树,红黑树有自动排序的功能,因此 map 内部所有元素都是有序的,红黑树的每一个节点都代表着 map 的一个元素。因此,对于 map 进行的查找、删除、添加等一系列的操作都相当于是对红黑树进行的操作。map 中的元素是按照二叉树存储的,特点就是左子树上所有节点的键值都小于根节点的键值,右子树所有节点的键值都大于根节点的键值,使用中序遍历可将键值按照从小到大遍历出来。
2. 各操作的时间复杂度 插入: O(logN) 查看: O(logN) 删除: O(logN)
unordered_map 实现原理
unordered_map 容器和 map 容器一样,以键值对(pair类型)的形式存储数据,存储的各个键值对的键互不相同且不允许被修改。但由于 unordered_map 容器底层采用的是哈希表存储结构,该结构本身不具有对数据的排序功能,所以此容器内部不会自行对存储的键值对进行排序。底层采用哈希表实现无序容器时,会将所有数据存储到一整块连续的内存空间中,并且当数据存储位置发生冲突时,解决方法选用的是“链地址法”(又称“开链法”).
map,unordered_map 的区别
map是基于红黑树实现的,unordered_map是基于哈希表实现的map根据元素的键值会自动排序,而unordered_map是乱序的map的增删改查时间复杂度是O(logN),而unordered_map的时间复杂度是最好情况是O(1),最坏情况是O(N)。

