目录
一、简述
二、下载安装虚拟机
2.1下载
2.2安装虚拟机
2.3安装Ubuntu系统
三、安装ros
3.1设置编码
3.2添加源
3.3安装ros
3.4设置环境变量
四、检验是否安装成功
五、常见问题说明
一、简述
ROS Humble Hawksbill 是 ROS 2 的第八个版本。它是最新的长期支持版本的 ROS 2 发行版,可以轻松安装在 Ubuntu 22.04 Jammy Jellyfish 和 Windows 10 上¹。Ubuntu 22.04 Jammy Jellyfish 是 Ubuntu 的一个长期支持版本,它提供免费的安全和维护更新直到 2027 年 4 月。
二、下载安装虚拟机
2.1下载
这个虚拟机直接在官网上面进行下载就好了,下面这是官网的连接
https://www.vmware.com/products/workstation-pro/workstation-pro-evaluation.html


2.2安装虚拟机
安装过程的时候需要输入秘钥,我使用的秘钥是MC60H-DWH D5-H80U9- 6V85M-8280D
要是用不了了自己去网上搜一下,有很多。
除以下一些情况需要注意下,其它的就一直下一步就ok了。

(要打钩增强)
2.3安装Ubuntu系统
新建一个虚拟机,选择自定义

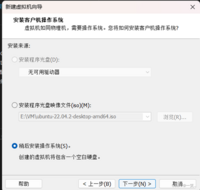
选择稍后安装操作系统
选择linux和Ubuntu64位

选择存储位置

选择第二个,将虚拟磁盘存储为单个文件
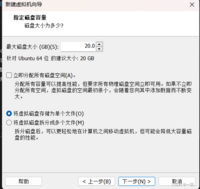
剩下的就默认就好了,一直下一步,直至完成。
安装Ubuntu操作系统

(这里是选择你提前下载好的ISO镜像文件)
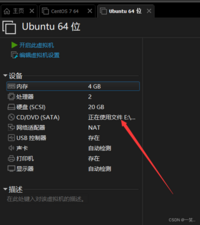
然后确定之后启动虚拟机,它就会开始自动安装了。
选择语言




然后接下来就是选择地区(默认上海),然后是用户名密码等信息,之后就进入安装了,这个过程可能需要半个小时左右,取决于电脑的配置。
如果后边卡在了这个界面,就按几下回车。

检验网络是否正常
打开终端窗口,执行以下指令,如下显示则说明网络正常
ping baidu.com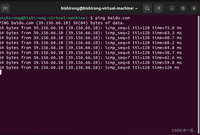
三、安装ros
3.1设置编码
sudo apt update 
sudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8export LANG=en_US.UTF-83.2添加源:
sudo apt update && sudo apt install curl gnupg lsb-releasesudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o/usr/share/keyrings/ros-archive-keyring.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3.3安装ros
sudo apt update 
sudo apt upgrade 
sudo apt install ros-humble-desktop
3.4设置环境变量
source /opt/ros/humble/setup.bash ![]()
echo "source /opt/ros/humble/setup.bash" >>~/.bashrc
四、检验是否安装成功
方法一:
使用terminal运行如下指令
ros2 run turtlesim turtlesim_node可以显示出来一只乌龟

然后不要关闭刚才那个终端,新开一个终端,执行以下指令,可以控制乌龟移动
ros2 run turtlesim turtle_teleop_key方法2:
打开一个终端窗口,执行以下命令
ros2 run demo_nodes_cpp talker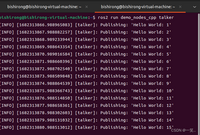
不要关闭这个窗口,再打开一个终端窗口,输入以下指令
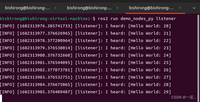
ros2 run demo_nodes_py listener如果出现以下显示,则说明安装成功
五、常见问题说明
1、提示sudo:curl:找不到命令
解决办法:管理员权限下,使用 apt-get 包管理器安装 curl 软件包。

2、执行3.2添加源的时候出问题
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o/usr/share/keyrings/ros-archive-keyring.gpg报错:

解决方法
进行如下修改:
5.2.1执行如下指令打开hosts文件
sudo vi /etc/hosts
5.2.2执行如下修改,在里面添加

最后保存即可。