张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 通信 - 第2页
ROS从入门到放弃(学习笔记1)_lightningwl的博客
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 674次

最近在想着做机器人,机缘巧合接触到了ROS,在这里分享一下我学习ROS的经历。首先就是安装ROS,安装ROS网上有很多资料可以查到,但是我在安装的时候初始化一直出问题,基本网上什么方法都尝试了,总是在最后一步失败,最后实在没办法了,就淘宝上买了一个ROS安装工具,很快就装好了。真香!安装并测试好ROS以后,就是学习一些ROS的核心概念,这里我主要是看古月居的视频,我大概把我的理解说一下。(本篇文章只是把自己对基本概念的理解进行阐述)
《物联网通信》知识提纲-第1章 概述_白`~`灰的博客
发布 : zsy861 | 分类 : 《资源分享》 | 评论 : 0 | 浏览 : 631次
第一章-物联网通信概述1.1物联网的起源与定义1.2物联网的特征与体系架构三个特征:三层架构:1.3物联网通信体系架构1.3.1通信问题算法1.3.2协议体系1.分层架构2.开放系统互联OSI参考模型1.4物联网通信技术1.4.1有线通信1.仪表总线2.以太网1.4.2无线通信1.RFID2.短距离通信NFC3.蓝牙4.ZigBee5.窄带物联网NB-IoT6.LoRaWAN1.1物联网的起源与定义
自动驾驶技术-环境感知篇:V2X技术的介绍_Garvin的专栏
发布 : zsy861 | 分类 : 《资源分享》 | 评论 : 0 | 浏览 : 475次
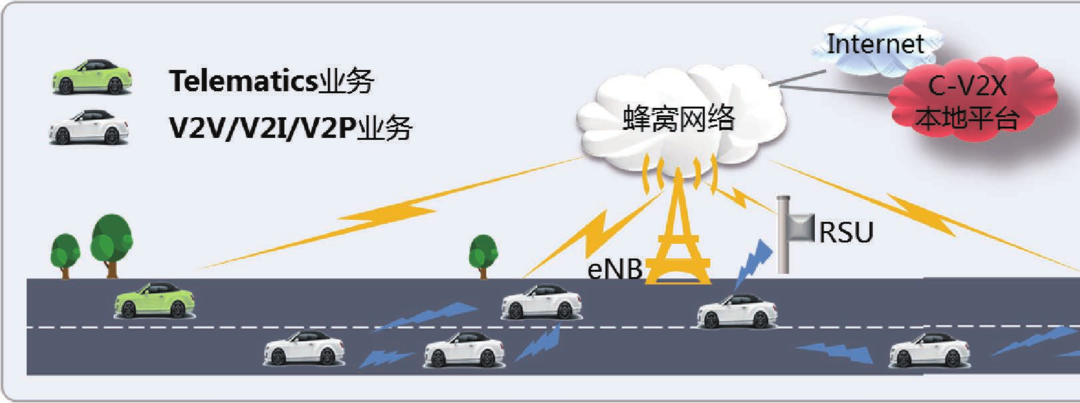
V2X技术概述 在前面的几篇文章分别介绍了自动驾驶在环境感知领域的相关技术点,主要介绍了如何通过雷达配合视觉技术实现车辆自身的智能。其实在环境感知方面,除了利用车辆自身的智能,还可以借助外部环境实现信息的获取,这一类技术统称为V2X技术。V2X(VehicletoEverything)技术又称为车用无线通信技术,本质上是一种物联网技术,V代表的是车辆,X代表的是道路、人、车、设备等一切可以连接的设备。V2X的本质就是通过道路、行人、车辆间的协调实现整个道路运输的智能化。比如前面有车要并线了,
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1