张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 《随便一记》 - 第413页
目标检测指标mAP详解
发布 : ofheart | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 1325次
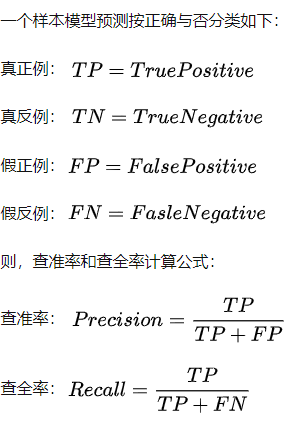
前言相信刚刚接触目标检测的小伙伴也是有点疑惑吧,目标检测的知识点和模型属实有点多,想要工作找CV的话,目标检测是必须掌握的方向了。我记得在找实习的时候,面试官就问到了我目标检测的指标是什么,答:mAP!问:mAP是什么?我:.......!☺所以在本文中我也是详细说一下mAP的含义,有什么不对的或者不全的欢迎大家指正!mAP是meanofAveragePrecision的缩写,意思是平均精确度(averageprecision)的平均(mean),是objectdetection中模型性能的衡量标准。objectdetection中,因为有物体定位框,分类中的accuracy并不适用,因此才提出了objectdetection独有的mAP指标,但这也导致mAP没有分类中
3D卷积神经网络详解
发布 : shanchahua | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 626次

13d卷积的官方详解 22D卷积与3D卷积1)2D卷积 2D卷积:卷积核在输入图像的二维空间进行滑窗操作。2D单通道卷积 对于2维卷积,一个3*3的卷积核,在单通道图像上进行卷积,得到输出的动图如下所示: 2D多通道卷积 在之前的2D单通道的例子中,我们在一张图像上使用卷积核进行扫描,得到一张特征图。这里的“被扫描图像”是一个通道,而非一张彩色图片。如果卷积核每扫描一个通道,就会得到一张特征图,那多通道的图像应该被怎样扫描呢?会有怎样的输出呢? 在一次扫描中,我们输入了一张拥有三个通道的彩色图像。对于这张图,拥有同样尺寸、但不同具体数值的三个卷积核会分别在三个通道上进行扫描,得出三个相应的“新通道”。由于同一张图
简单三步 用Yolov5快速训练自己的数据集
发布 : xiaowang | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 872次
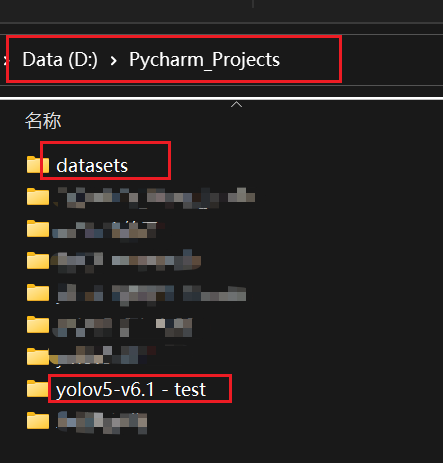
简单三步!用自己的数据集快速训练Yolov5模型文章目录简单三步!用自己的数据集快速训练Yolov5模型1第一步;准备好划分完的数据集2第二步;写一个数据集的配置文件3第三步;修改train.py参数4小知识?:标签内容解释5常见问题?本人更多YOLOv5实战内容导航???网上关于Yolov5如何标注数据集的文章很多,如果大家嫌麻烦可以看我这篇文章介绍的标注工具,可以直接标注成YOLO格式的下面直接通过一种简单明了的方式让大家迅速的开始训练自己的数据集;相信大家在运行Yolov5时coco128数据集已经下载好了,coco128数据集默认的位置就是我们项目代码的同级目录,所以我以这个位置作为参考,通过对比的方式让大家迅速了解读取数据集的原理;这次我使用的是划分
【个人笔记】UNet使用自己数据集训练(多分类)
发布 : hao | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 954次
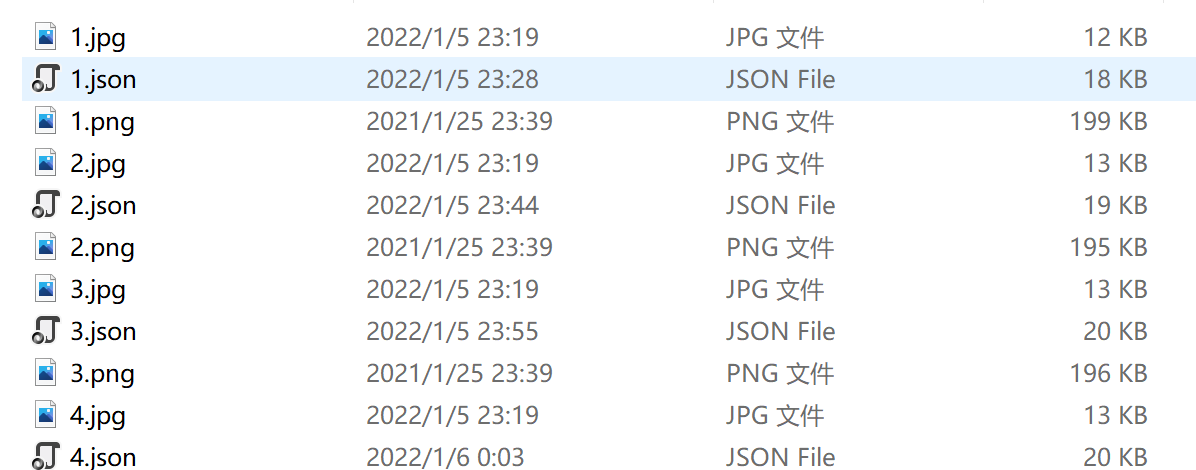
一、UNet代码链接UNet代码:U-Net代码(多类别训练)-深度学习文档类资源-CSDN下载二、开发环境Windows、cuda:10.2、cudnn:7.6.5pytorch1.6.0python3.7pytorch以及对应的torchvisiond下载命令#CUDA10.2conda安装condainstallpytorch==1.6.0torchvision==0.7.0cudatoolkit=10.2-cpytorch#CUDA10.2pip安装pipinstalltorch==1.6.0torchvision==0.7.0官网下载,较慢,可自己设置豆瓣源/清华源等下载三、准备数据集1、使用labelme软件标注
CVAT——计算机视觉标注工具
发布 : hui | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 1138次
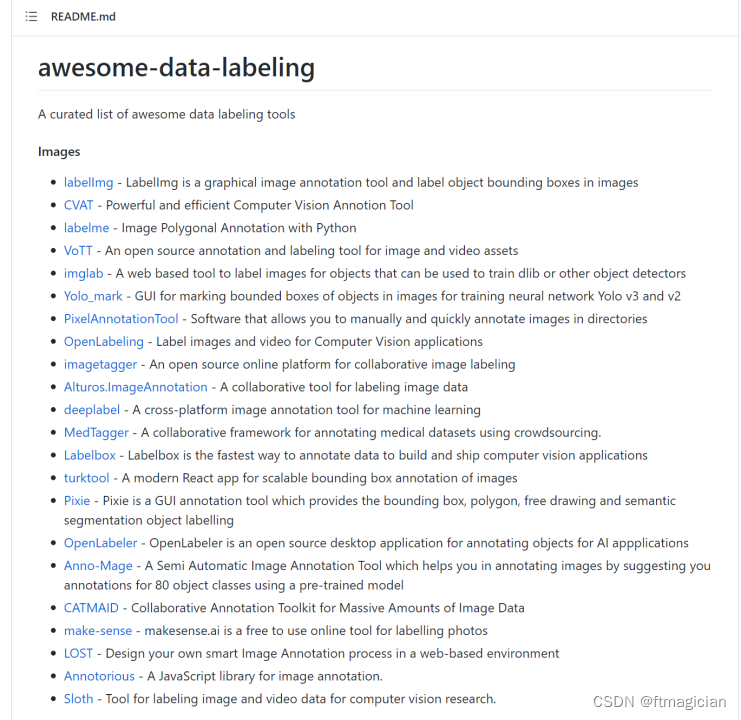
CVAT——计算机视觉标注工具一、CVAT简介CVAT是用于计算机视觉的强大、有效、免费、在线、交互式视频和图像注释工具Intel团队正在使用它来注释数百万个具有不同属性的对象许多UI和UX决策都是基于专业数据注释团队的反馈CVAT官方地址视觉开源工具排行榜CVAT架构图二、CVAT核心概念项目在CVAT,您可以创建一个包含相同类型任务的项目。与项目相关的所有任务都将继承标签列表更改项目的标题打开“操作”菜单。每个按钮负责操作菜单中的特定功能更改问题跟踪器或打开问题跟踪器(如果指定)更改标签。您可以在Raw模式或Constructor模式下添加新标签或为现有标签添加属性分配给——用于将项目分配给一个人。开始输入受让人的姓名和/或从下拉列表中选择合适的人
学习笔记:多模态
发布 : 郑州电脑哥 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 525次
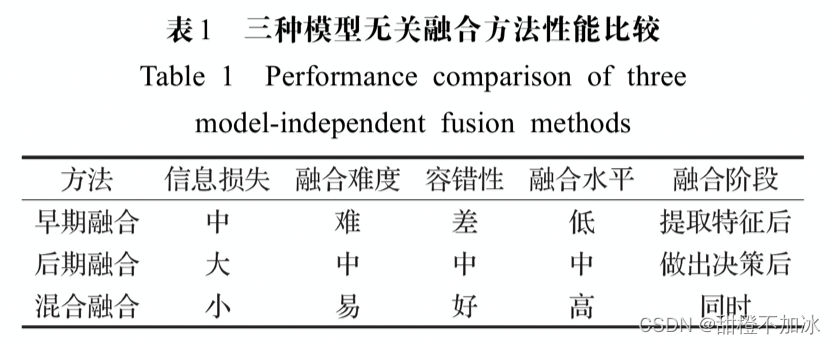
1.多模态数据:不同的存在形式或信息来源均可被称之为一种模态。由两种或两种以上模态组成的数据称之为多模态数据(多模态用来表示不同形态的数据形式,或者同种形态不同的格式,一般表示文本、图片、音频、视频、混合数据)。多模态数据是指对于同一个描述对象,通过不同领域或视角获取到的数据,并且把描述这些数据的每一个领域或视角叫做一个模态。2.多模态数据融合:主要是指利用计算机进行多模态数据的综合处理,负责融合各个模态的信息来执行目标预测。多模态数据融合负责将多个模态的信息进行有效的整合,汲取不同模态的优点,完成对信息的整合。3.多模态融合分类法:A.模型无关的融合方法:简单但实用性低,融合过程容易产生损失融合发生的时间是一个重要的考虑因素。针对不同的融合时期或融合水平,模型无关的融合方法共
权重确定方法五:CRITIC权重法
发布 : admin08 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 2448次
半是温柔半是风,一生从容一生花目录1.原理介绍2.步骤详解2.1获取数据2.2数据标准化2.3计算信息承载量2.4计算权重3.案例分析3.1数据获取3.2数据标准化3.3计算相关系数3.4计算信息承载量3.5计算权重4.算法改进5.完整代码5.1方法类CRITIC.java5.2主类CRITICmain.java1.原理介绍 通常在确定指标权重时往往更多关注的是数据本身,而数据之间的波动性大小也是一种信息,或是数据之间的相关关系大小,也是一种信息,可利用数据波动性大小或数据相关关系大小计算权重。 CRITIC权重法是一种基于数据波动性的客观赋权法。其思想在于两项指标,
ROS简介(新手入门须知)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 581次

一、背景随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求。2010年WillowGarage公司发布了开源机器人操作系统ROS(robotoperatingsystem),很快在机器人研究领域展开了学习和使用ROS的热潮。从下面这张图片来看,ROS是2007年诞生与斯坦福大学,斯坦福大学,世界名校,而且是专业研究机器人的,目前也在从事人工智能的研发,ROS诞生于这样的贵族,可见ROS的发展还是非常有前途的。二、需求(为什么需要ROS)想设计制造一个复杂的机器人,这个机器人能够类似于人一样能够感知,自我导航,能够自我控制去做一些复杂的工作。面对这么复杂的工作,在研发过程中肯定需要很多各样的有效资源
机器学习中的数学——距离定义(一):欧几里得距离(Euclidean Distance)
发布 : xiaowang | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 608次

分类目录:《机器学习中的数学》总目录相关文章:·距离定义:基础知识·距离定义(一):欧几里得距离(EuclideanDistance)·距离定义(二):曼哈顿距离(ManhattanDistance)·距离定义(三):闵可夫斯基距离(MinkowskiDistance)·距离定义(四):切比雪夫距离(ChebyshevDistance)·距离定义(五):标准化的欧几里得距离(StandardizedEuclideanDistance)·距离定义(六):马氏距离(MahalanobisDistance)·距离定义(七):兰氏距离(LanceandWilliamsDistance)/堪培拉距离(CanberraDistance)·距离定
YOLOV5更换轻量级的backbone:mobilenetV2
发布 : zhumeng | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 900次
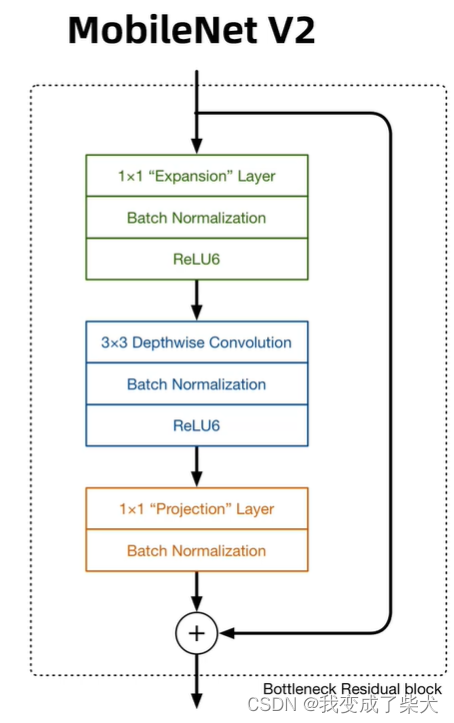
目录简洁概要:修改主干网络:一:添加自己主干网络二:在yolo.py中添加common中的两个函数三:制作mobilenetv2的yaml配置文件四:制作数据集VOC的yaml配置文件五:启用训练六:性能检测简洁概要:MobileNetV2主要采用了深度可分离卷积,在MobileNetv1的基础上引用了残差模块以及Relu6的激活函数,用1*n,n*1的思想代替了n*n的矩阵,计算量会更小。修改主干网络:一:添加自己主干网络yolov56.1的版本中,在models/common中添加MobilenetV2作为backboneclassConvBNReLU(nn.Sequential):#该函数主要做卷积池化ReLU6激活操作def__
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1