二叉搜素树简单介绍
二叉搜索树又称二叉排序树,是具有以下性质的二叉树:
若它的左子树不为空,则左子树上所有节点的值都小于根节点的值
若它的右子树不为空,则右子树上所有节点的值都大于根节点的值
它的左右子树也分别为二叉搜索树
注意:空树也是二叉搜索树
二叉搜素树的模型
K模型:K模型即只有key作为关键字,节点中只需要存储Key即可,关键字即为需要搜索到的值。
比如:给一个单词word,判断该单词是否拼写正确,具体方式如下:
以词库中所有单词集合中的每个单词作为key,构建一棵二叉搜索树
在二叉搜索树中检索该单词是否存在,存在则拼写正确,不存在则拼写错误。
每一个关键码key,都有与之对应的值Value,即<Key, Value>的键值对。
该种方式在现实生活中非常常见:
比如
英汉词典就是英文与中文的对应关系,通过英文可以快速找到与其对应的中文,英文单词与其对应的中文<word, chinese>就构成一种键值对;
再比如统计单词次数,统计成功后,给定单词就可快速找到其出现的次数,单词与其出
现次数就是<word, count>就构成一种键值对。
K模式和KV模式实现上基本一样,就是节点中存储的是key还是<key,val>的区别
二叉搜素树的性能
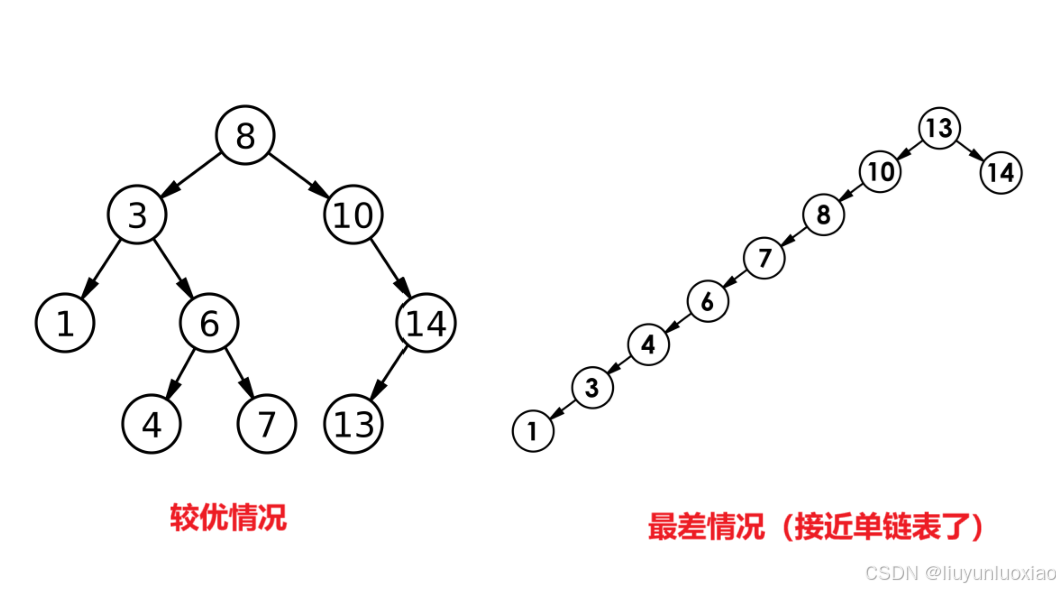
二叉搜索树的性能取决于树的高度,因为一次查找最多查找高度次,而删除和插入也是在查找的基础上增加了一些O(1)的操作
在最理想的情况下,树是完全平衡的,平均查找、插入和删除的时间复杂度O(log N)。
但在最坏的情况下,树可能退化成一个链表,此时这些操作的时间复杂度将增加到O(N)。
例:
全部的实现代码放在了文章末尾
准备工作
创建两个文件,一个头文件BSTree.hpp,一个源文件test.cpp
【因为模板的声明和定义不能分处于不同的文件中,所以把成员函数的声明和定义放在了同一个文件BSTree.hpp中】
RBTree.hpp:存放包含的头文件,命名空间的定义,成员函数和命名空间中的函数的定义
test.cpp:存放main函数,以及测试代码
包含头文件
iostream:用于输入输出
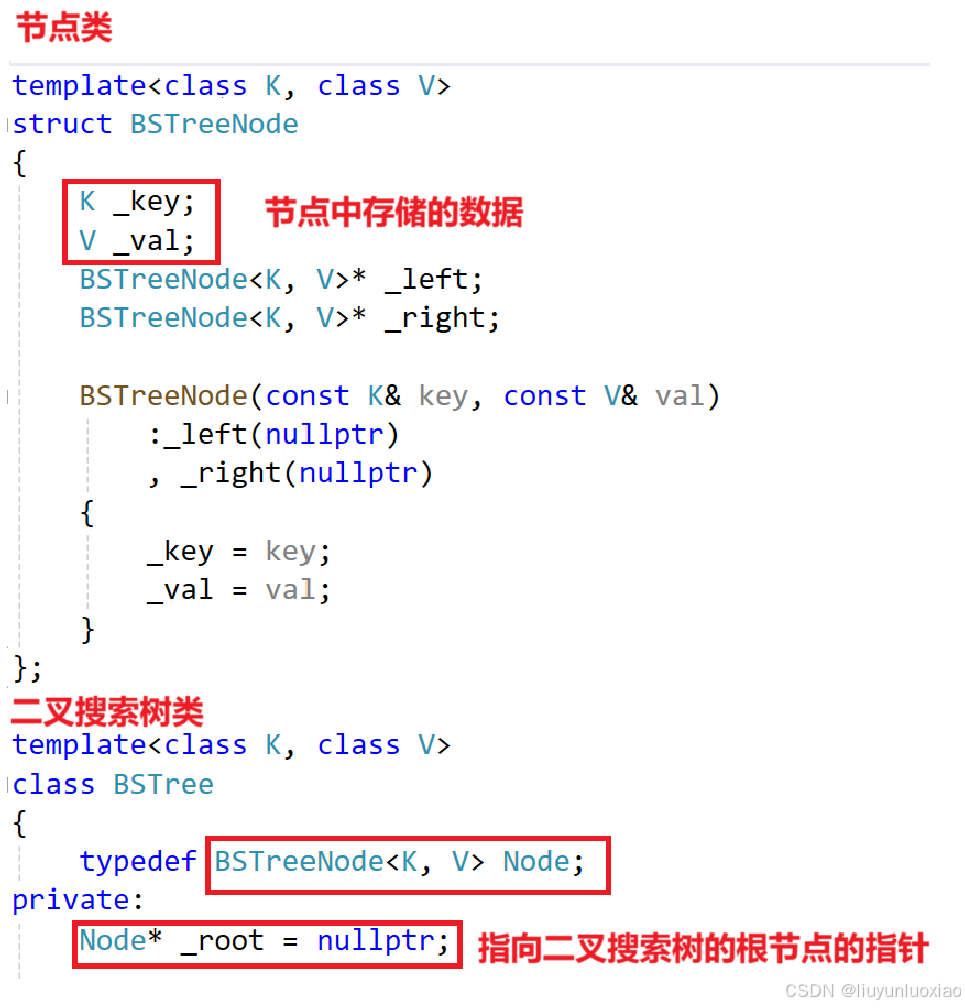
类的成员变量
构造函数和拷贝构造
构造函数没什么好说的,默认构造就行了
BSTree() :_root(nullptr){}拷贝构造:
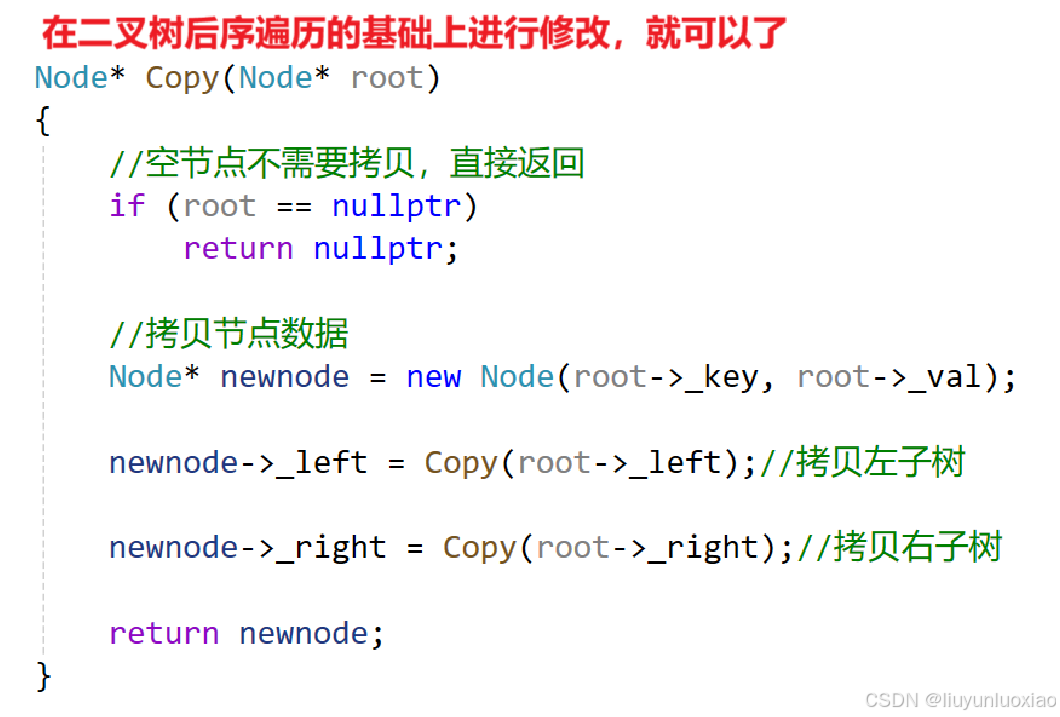
因为节点都是从堆区new出来的,所以要深拷贝
使用递归实现深拷贝:
因为拷贝构造不能有多余的参数,但是递归函数又必须使用参数记录信息
所以再封装一个成员函数,专门用来递归拷贝:
然后在拷贝构造里面调用一下这个函数就行了
拷贝构造BSTree(const BSTree& obj){_root = Copy(obj._root);}swap和赋值运算符重载
交换两颗二叉搜索树的本质就是交换两颗数的资源(数据),而它们的资源都是从堆区申请来的,然后用指针指向这些资源
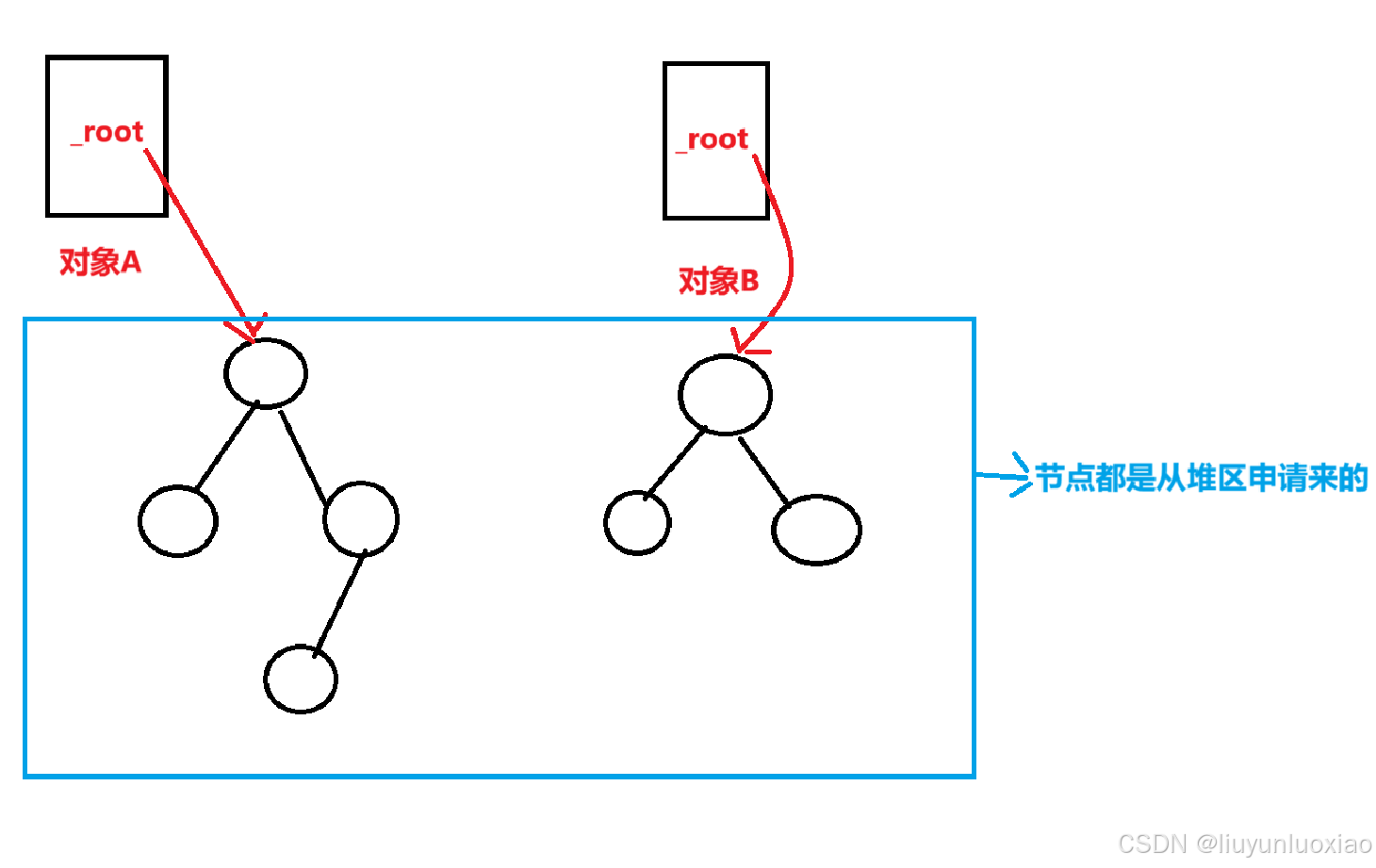
并不是把资源存储在了二叉搜索树对象中
所以资源交换很简单,直接交换_root指针的指向即可
void Swap(BSTree& obj){std::swap(_root, obj._root);}赋值运算符重载
BSTree& operator=(BSTree obj){this->Swap(obj);return *this;}为什么上面的两句代码就可以完成深拷贝呢?
这是因为:
使用了传值传参,会在传参之前调用拷贝构造,再把拷贝构造出的临时对象作为参数传递进去
赋值运算符的左操作数,*this再与传入的临时对象obj交换,就直接完成了拷贝
在函数结束之后,存储在栈区的obj再函数结束之后,obj生命周期结束
obj调用析构函数,把指向的从*this那里交换来的不需要的空间销毁
析构函数
使用递归遍历,把所有从堆区申请的节点都释放掉:
因为析构函数不能有多余的参数,但是递归函数又必须使用参数记录信息
所以再封装一个成员函数,专门用来递归释放:
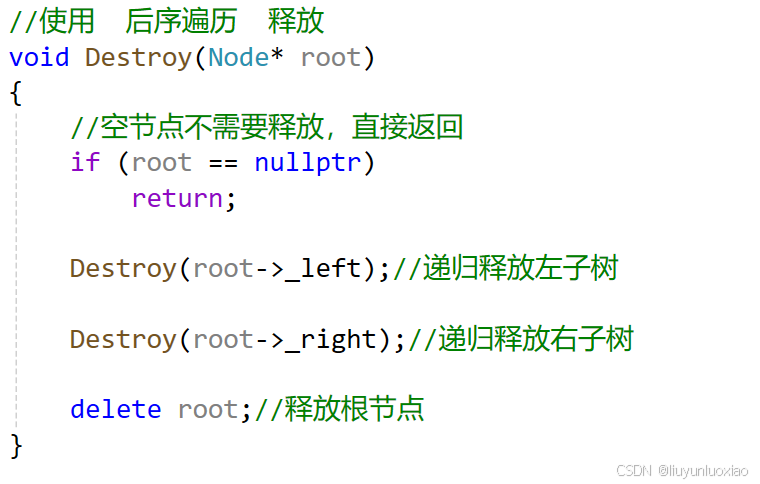
然后在拷贝构造里面调用一下这个函数就行了
析构函数~BSTree(){Destroy(_root);_root = nullptr;}find
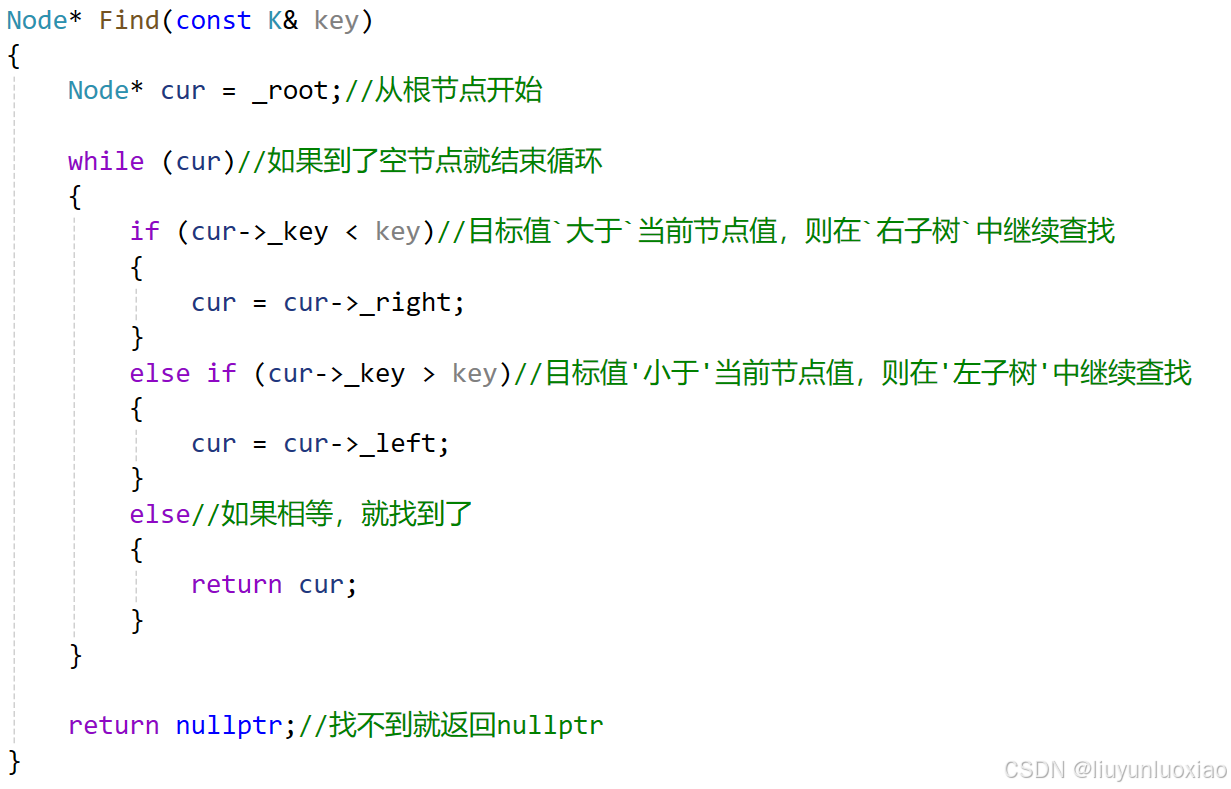
具体流程:
从根节点开始,将目标值(传入的key)与当前节点的key进行比较。
如果目标值小于当前节点值,则在左子树中继续查找;
如果目标值大于当前节点值,则在右子树中继续查找。
这个过程一直进行,直到找到与目标值或者到达空节点为止。
把上述过程转成代码:
insert
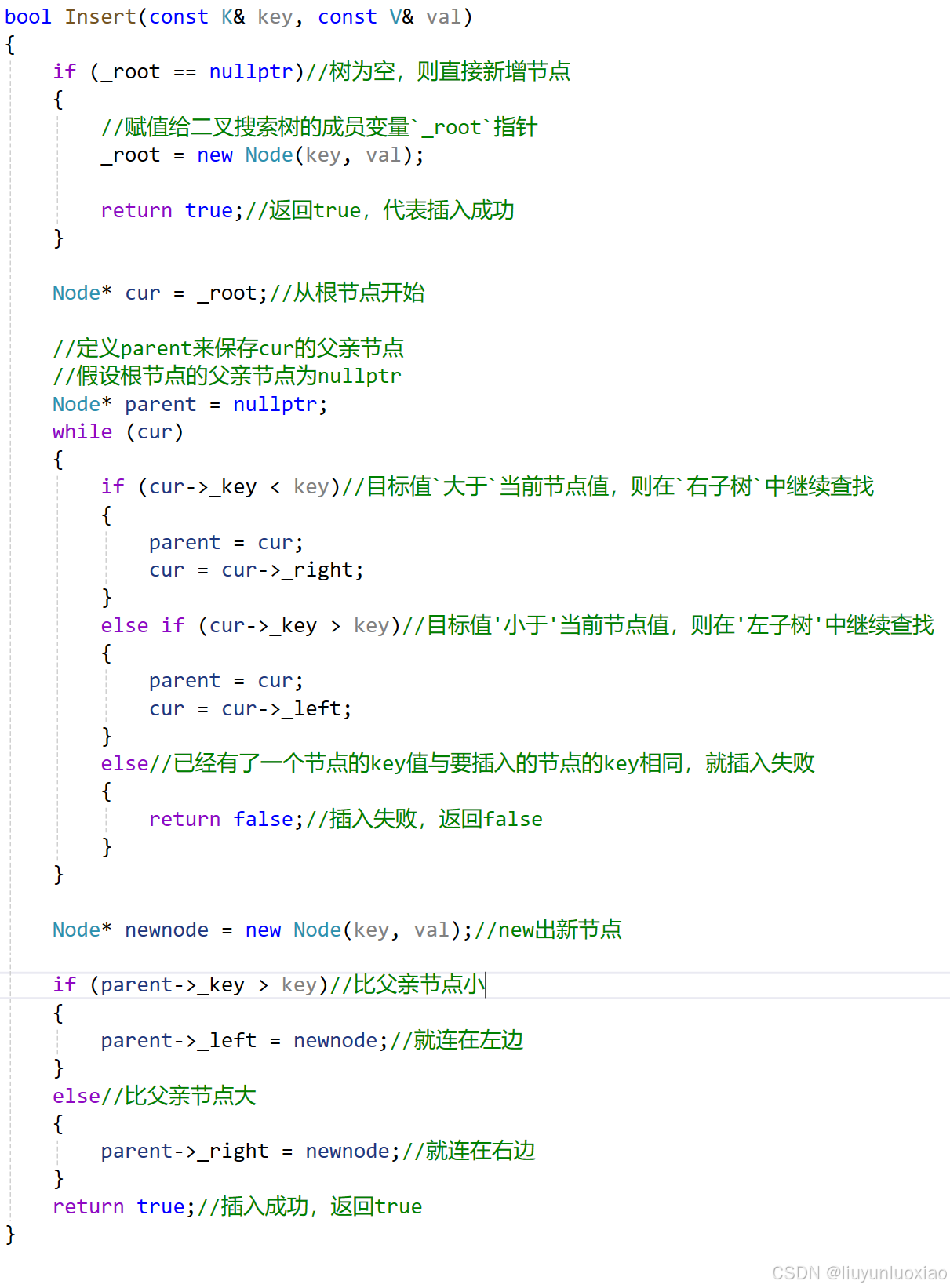
插入的具体过程如下:
树为空,则直接新增节点,赋值给二叉搜索树的成员变量_root指针
树不空,则按照查找(find)的逻辑找到新节点应该插入的位置
树不空,如果树中已经有了一个节点的key值与要插入的节点的key相同,就插入失败
这个过程一直进行,直到找到与传入的key相等的节点或者到达空节点为止。
把上述过程转成代码:
erase
删除操作较为复杂,需要先在数中找到要删除的节点,再根据要删除节点的子节点数量进行不同的处理:
如果要删除节点没有子节点,则直接删除该节点。
如果要删除节点有一个子节点(子树),则用其子节点(子树)替换该节点。
如果要删除节点有两个子节点(子树)
在右子树中找到最小值的节点(或左子树中找到最大值的节点)来替换待删除节点,然后删除那个最小值(或最大值)的节点
情况1可以和情况2合并一下
把上述过程转成代码:
bool Erase(const K& key){Node* cur = _root;从根节点开始Node* parent = nullptr; 先找到要删除的节点(cur)while (cur)如果到了空节点就结束循环{if (cur->_key < key) 目标值`大于`当前节点值,则在`右子树`中继续查找{parent = cur;cur = cur->_right;}else if (cur->_key > key) 目标值'小于'当前节点值,则在'左子树'中继续查找{parent = cur;cur = cur->_left;}else{break;找到要删除的节点了,结束循环}}如果找到空节点了,还没找到要删除的节点就说明树里面本来就没有这个key,不需要删除if (cur == nullptr){return false; 删除失败,返回false}else{如果 左 子树为空, 右 子树不为空(或者左右都为空)即只有右子节点(右子树)或者没有子节点if (cur->_left == nullptr){如果父亲节点为空,就表示cur为根节点if (parent == nullptr){使用右子节点,代替根节点_root = cur->_right;}else 根据cur与它的父亲节点的链接关系{if (cur == parent->_left){使用右子节点,代替curparent->_left = cur->_right;}else{使用右子节点,代替curparent->_right = cur->_right;}}delete cur; 删除cur节点,即要删除的节点}如果 右 子树为空, 左 子树不为空(或者左右都为空)即只有左子节点(左子树)或者没有子节点else if (cur->_right == nullptr){如果父亲节点为空,就表示cur为根节点if (parent == nullptr){使用左子节点,代替根节点_root = cur->_left;}else 根据cur与它的父亲节点的链接关系{if (cur == parent->_left){使用左子节点,代替curparent->_left = cur->_left;}else{使用左子节点,代替curparent->_right = cur->_left;}}delete cur; 删除cur节点,即要删除的节点}else 如果左右子树都不为nullptr{去cur(要删除的节点)的右子树中找key最小的节点Node* tmp = cur->_right;Node* prev = cur;二叉搜索树的最小节点,一定在这颗树的最左边while (tmp->_left) 所以一直往左走,直到左子树为nullptr{prev = tmp;tmp = tmp->_left; 往左走}用右子树中key最小的节点的数据,替换cur中的数据也就相当于把cur(要删除的节点)删除了cur->_key = tmp->_key;cur->_val = tmp->_val;如果prev == cur,就说明tmp就是key最小的节点了此时tmp在cur(prev)的右边if (prev == cur){把cur(prev)的 右边 连上tmp的右子树因为tmp虽然是最左节点,但是它有可能还有右孩子cur->_right = tmp->_right;delete tmp;}else{把prev的 左边 连上tmp的右子树因为tmp虽然是最左节点,但是它有可能还有右孩子prev->_left = tmp->_right;delete tmp;}}}return true; 删除成功,返回true}empty
bool Empty(){ 如果_root为空,那么树就是空的return _root == nullptr;}size
使用递归实现二叉搜索树的节点个数统计:
因为我们经常使用的stl的容器的size都是没有参数的,但是递归函数又必须使用参数记录信息
所以再封装一个成员函数,专门用来递归:
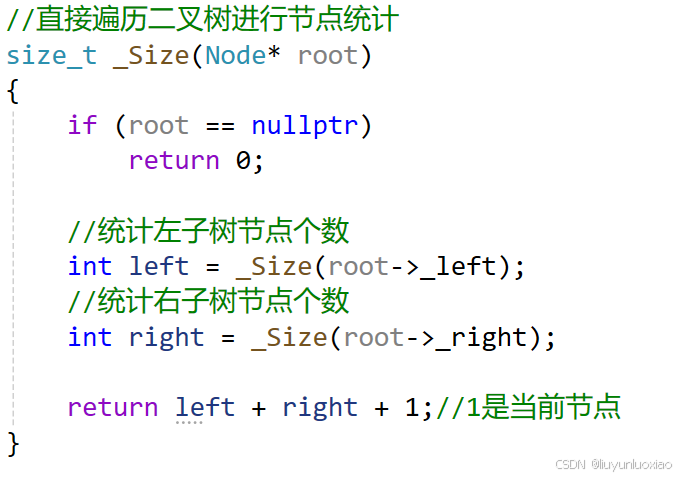
然后再size里面调用一下就行了
size_t Size(){return _Size(_root);}中序遍历
中序遍历的递归函数:
然后再调用递归函数
void InOrder(){_InOrder(_root);}全部代码
#include<iostream>using namespace std;template<class K, class V>struct BSTreeNode{K _key;V _val;BSTreeNode<K, V>* _left;BSTreeNode<K, V>* _right;BSTreeNode(const K& key, const V& val):_left(nullptr), _right(nullptr){_key = key;_val = val;}};template<class K, class V>class BSTree{typedef BSTreeNode<K, V> Node;public:BSTree() :_root(nullptr){}BSTree(const BSTree& obj){_root = Copy(obj._root);}BSTree& operator=(BSTree obj){this->Swap(obj);return *this;}~BSTree(){Destroy(_root);_root = nullptr;}void Swap(BSTree& obj){std::swap(_root, obj._root);}bool Insert(const K& key, const V& val){if (_root == nullptr)//树为空,则直接新增节点{//赋值给二叉搜索树的成员变量`_root`指针_root = new Node(key, val);return true;//返回true,代表插入成功}Node* cur = _root;//从根节点开始//定义parent来保存cur的父亲节点//假设根节点的父亲节点为nullptrNode* parent = nullptr;while (cur){if (cur->_key < key)//目标值`大于`当前节点值,则在`右子树`中继续查找{parent = cur;cur = cur->_right;}else if (cur->_key > key)//目标值'小于'当前节点值,则在'左子树'中继续查找{parent = cur;cur = cur->_left;}else{return false;}}Node* newnode = new Node(key, val);if (parent->_key > key){parent->_left = newnode;}else{parent->_right = newnode;}return true;}Node* Find(const K& key){Node* cur = _root;//从根节点开始while (cur)//如果到了空节点就结束循环{if (cur->_key < key)//目标值`大于`当前节点值,则在`右子树`中继续查找{cur = cur->_right;}else if (cur->_key > key)//目标值'小于'当前节点值,则在'左子树'中继续查找{cur = cur->_left;}else//如果相等,就找到了{return cur;}}return nullptr;//找不到就返回nullptr}bool Erase(const K& key){Node* cur = _root;Node* parent = nullptr;while (cur){if (cur->_key < key){parent = cur;cur = cur->_right;}else if (cur->_key > key){parent = cur;cur = cur->_left;}else{break;}}if (cur == nullptr)return false;else{if (cur->_left == nullptr){if (parent == nullptr){_root = cur->_right;}else{if (cur == parent->_left)parent->_left = cur->_right;elseparent->_right = cur->_right;}delete cur;}else if (cur->_right == nullptr){if (parent == nullptr){_root = cur->_left;}else{if (cur == parent->_left)parent->_left = cur->_left;elseparent->_right = cur->_left;}delete cur;}else{Node* tmp = cur->_right;Node* prev = cur;while (tmp->_left){prev = tmp;tmp = tmp->_left;}cur->_key = tmp->_key;cur->_val = tmp->_val;if (prev == cur){cur->_right = tmp->_right;delete tmp;}else{prev->_left = tmp->_right;delete tmp;}}}return true;}void InOrder(){_InOrder(_root);}bool Empty(){return _root == nullptr;}size_t Size(){return _Size(_root);}size_t Height(){return _Height(_root);}private:Node* _root = nullptr;size_t _Height(Node* root){if (root == nullptr)return 0;int left = _Height(root->_left);int right = _Height(root->_right);return left > right ? left + 1 : right + 1;}Node* Copy(Node* root){if (root == nullptr)return nullptr;Node* newnode = new Node(root->_key, root->_val);newnode->_left = Copy(root->_left);newnode->_right = Copy(root->_right);return newnode;}//使用 后序遍历 释放void Destroy(Node* root){//空节点不需要释放,直接返回if (root == nullptr)return;Destroy(root->_left);//递归释放左子树Destroy(root->_right);//递归释放右子树delete root;//释放根节点}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);//遍历左子树//打印信息cout << root->_key << ":" << root->_val << endl;_InOrder(root->_right);//遍历右子树}//直接遍历二叉树进行节点统计size_t _Size(Node* root){if (root == nullptr)return 0;//统计左子树节点个数int left = _Size(root->_left);//统计右子树节点个数int right = _Size(root->_right);return left + right + 1;//1是当前节点}};