一、版本介绍
1.支持的软硬件设备
Ubuntu 24.04 (Noble): amd64 和 arm64Windows 10 (Visual Studio 2019): amd64RHEL 9: amd64macOS: amd64Debian Bookworm: amd642.版本的改进
common_interfaces :新增 VelocityStamped 消息和 Marker.msg 中的 ARROW_STRIP 类型。image_transport :支持懒订阅者,添加设置回调组和允许列表的选项。ros2cli :增加了 --log-file-name 命令行参数和订阅选项中的 QoS。rosbag2 :支持服务数据的录制和回放,新增过滤模式,优化播放器和录音机组件的性能。rviz2 :添加 TF 显示的正则表达式过滤字段和话题状态的订阅频率显示。Jazzy是Ubuntu24.04目前支持的ROS版本,而之前的humble,noetic等版本是不在该版本支持的,所以一定不能安装错版本。
二、安装教程
安装教程参考以下链接:
Ubuntu (Debian packages) — ROS 2 Documentation: Jazzy documentation
ROS2入门教程-在ubuntu24.04下apt安装ros2版本jazzy - 创客智造
1.查看是否支持UTF-8编码:
locale # check for UTF-8sudo apt update && sudo apt install localessudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8export LANG=en_US.UTF-8locale # verify settings
2.启动Ubuntu universe储存库
sudo apt install software-properties-commonsudo add-apt-repository universe
可以用以下命令检查,一般Ubuntu24.04自带universe
 3.设置软件源
3.设置软件源
sudo apt update && sudo apt install curl -ysudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
 如果在设置软件源的过程中报错连接不上服务器,那可能是网络的问题,可以切换网络,比如连接手机热点等,或者稍等一会再进行操作。
如果在设置软件源的过程中报错连接不上服务器,那可能是网络的问题,可以切换网络,比如连接手机热点等,或者稍等一会再进行操作。
4.添加密钥
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null5.安装ROS2
先进行更新检测
sudo apt update然后进行升级
sudo apt upgrade安装桌面完整版(建议)
sudo apt install ros-jazzy-desktop
6.环境配置
每次打开终端时,都需要进行环境配置:
# Replace ".bash" with your shell if you're not using bash# Possible values are: setup.bash, setup.sh, setup.zshsource /opt/ros/jazzy/setup.bash若想在后续使用中不用进行环境配置,可以直接将命令写进bashrc文件
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc三、测试
1.打开一个新的终端,输入命令,开始发布话题:
source /opt/ros/jazzy/setup.bashros2 run demo_nodes_cpp talker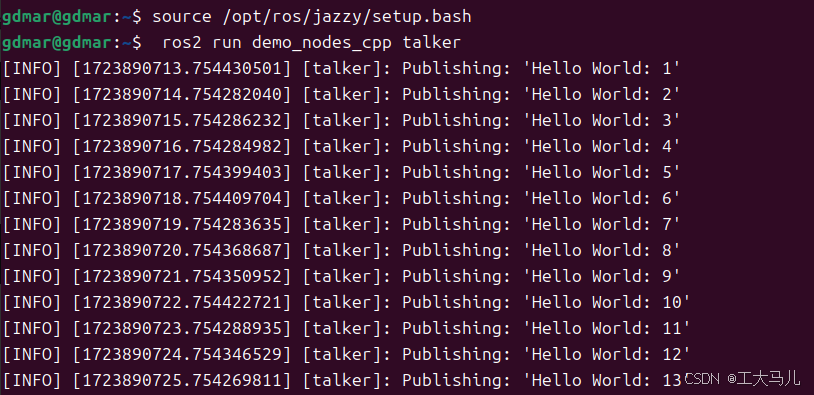
2.打开另一个新的终端,接收话题
source /opt/ros/jazzy/setup.bashros2 run demo_nodes_py listener
至此安装完成,可以开始你的ROS学习之旅啦。