一. 准备好Pytorch模型和yolov5-6.0项目并配置好环境
首先需要在官网下载yolov5-6.0的项目
1 我们打开yolov的官网,Tags选择6.0版本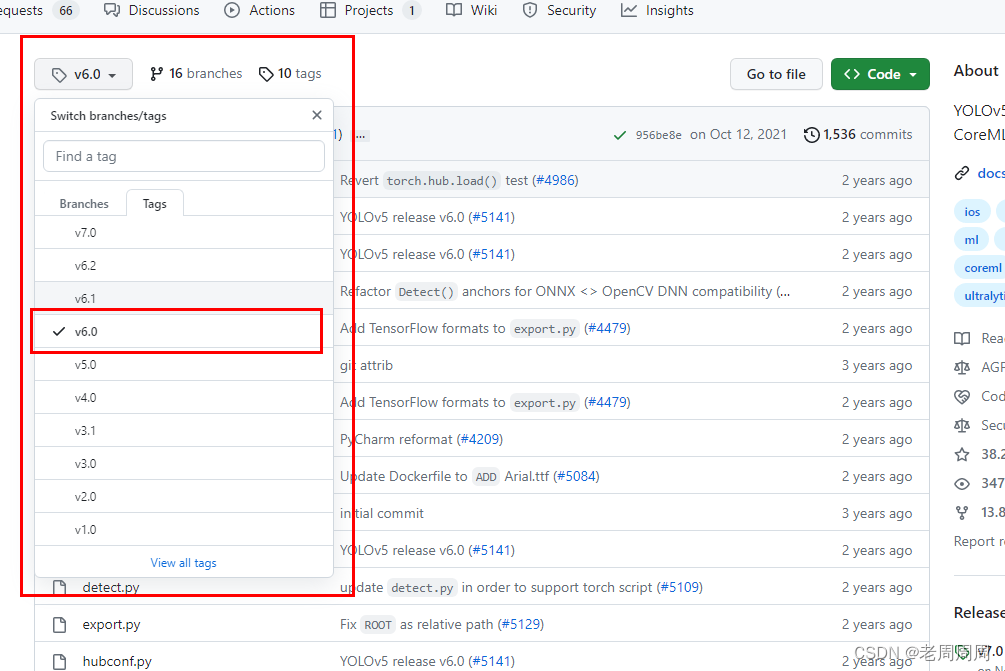 2. 下载该压缩包并解压到工程目录下
2. 下载该压缩包并解压到工程目录下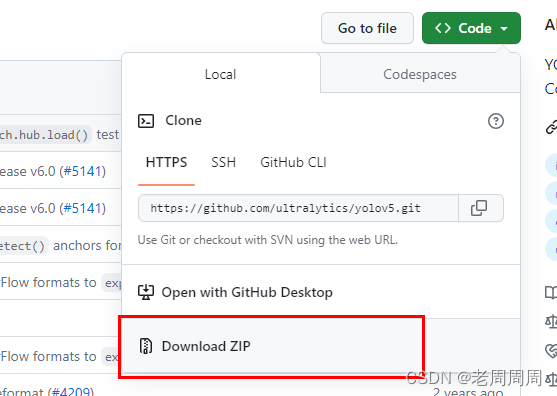
3. 我们这里使用pycharm,专门针对python的IDE,用起来非常方便,下载方式就是官网直接下载,用的是社区版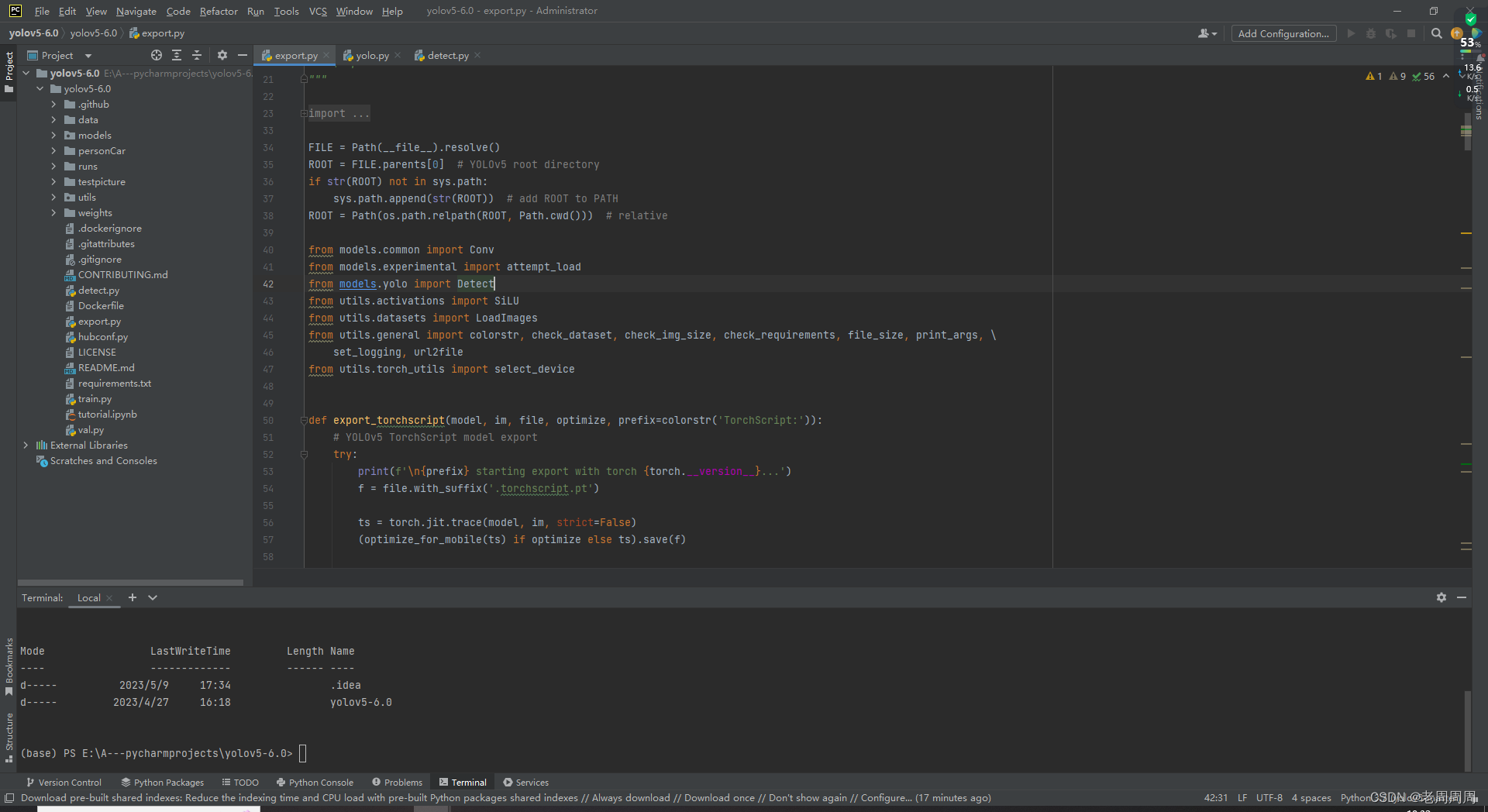
4. 我们需要安装环境,这里我推荐安装Anaconda在电脑上,这是一个非常方便的包管理工具,可以选择不同版本的python和pip以及基础的tools工具。这里不多说,直接推荐教程
https://blog.csdn.net/whc18858/article/details/127132558?ops_request_misc=&request_id=&biz_id=102&utm_term=pc%E4%B8%8A%E5%AE%89%E8%A3%85Anconda%E5%B9%B6%E9%85%8D%E7%BD%AEpycharm&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-127132558.142v86control,239v2insert_chatgpt&spm=1018.2226.3001.4187
配置项目环境,上面教程中也已经提及了怎么配置解释器,对于该项目来说,要配置python3.7。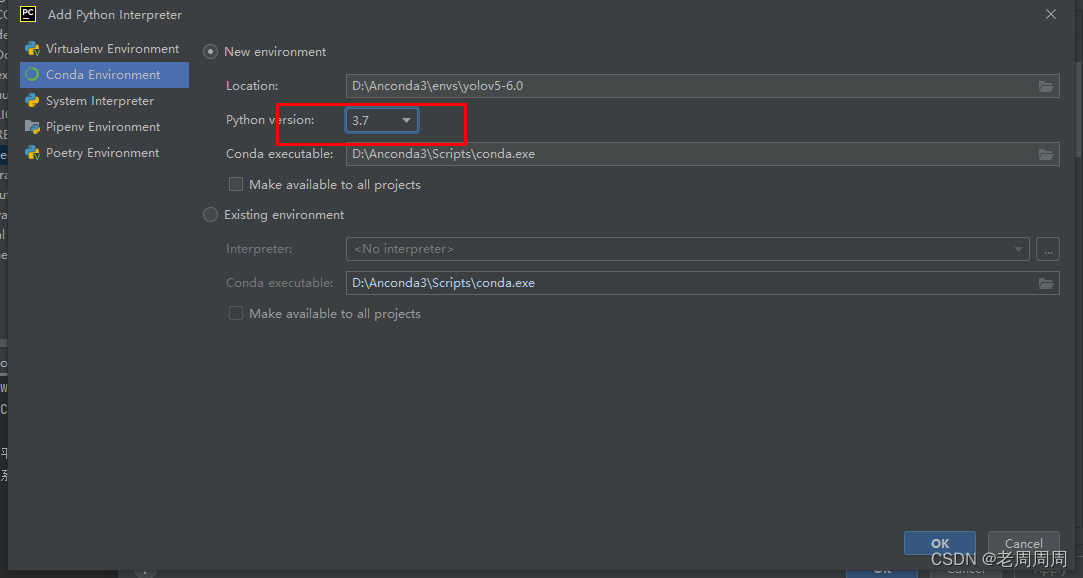 等待安装环境后,在终端查看是否是在Anaconda的虚拟环境中,如果是base的话应该是没有进入到该项目的虚拟环境中,这就需要你知道你创建虚拟环境时候的名字,在右下角也能够看到
等待安装环境后,在终端查看是否是在Anaconda的虚拟环境中,如果是base的话应该是没有进入到该项目的虚拟环境中,这就需要你知道你创建虚拟环境时候的名字,在右下角也能够看到 这时候需要我们输入下面进入到该虚拟环境
这时候需要我们输入下面进入到该虚拟环境 conda activate yolov5-master
现在我们就进入到该虚拟环境下了,可以进行一顿操作了
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple 结果输出,效果还行
结果输出,效果还行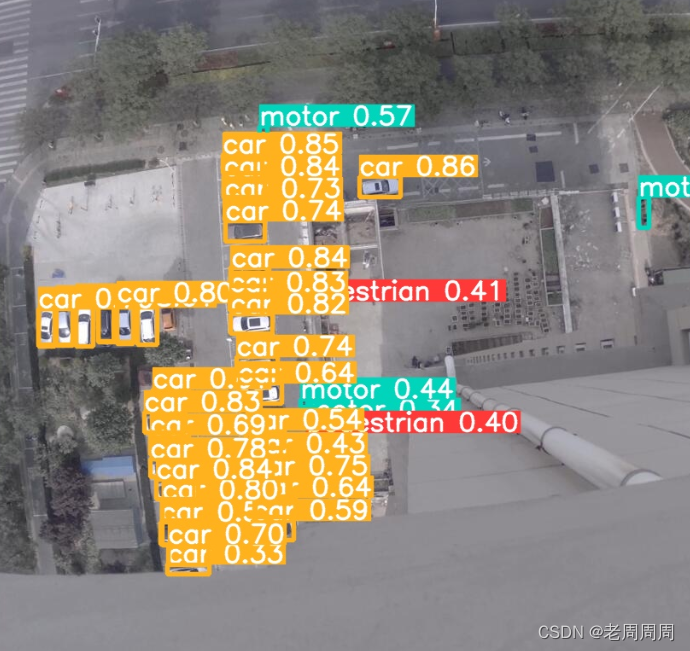
二. 修改部分项目代码并转换为onnx模型
就像网上很多教程说的,想要输出onnx模型需要修改yolo.py中的代码,该代码在models下面 这段代码是用PyTorch实现的目标检测算法中的前向传播函数。算法采用的是YOLOv5的变种。主要的思路是对输入的特征图进行多尺度的卷积和处理,然后把处理结果拼接在一起得到最终的检测结果
这段代码是用PyTorch实现的目标检测算法中的前向传播函数。算法采用的是YOLOv5的变种。主要的思路是对输入的特征图进行多尺度的卷积和处理,然后把处理结果拼接在一起得到最终的检测结果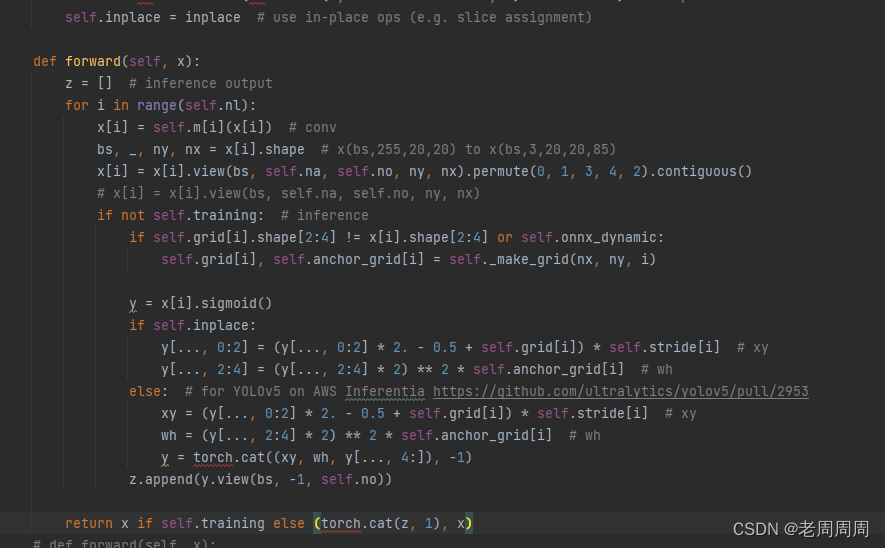 需要改为下面的代码:
需要改为下面的代码: def forward(self, x): z = [] # inference output for i in range(self.nl): x[i] = self.m[i](x[i]) # conv return x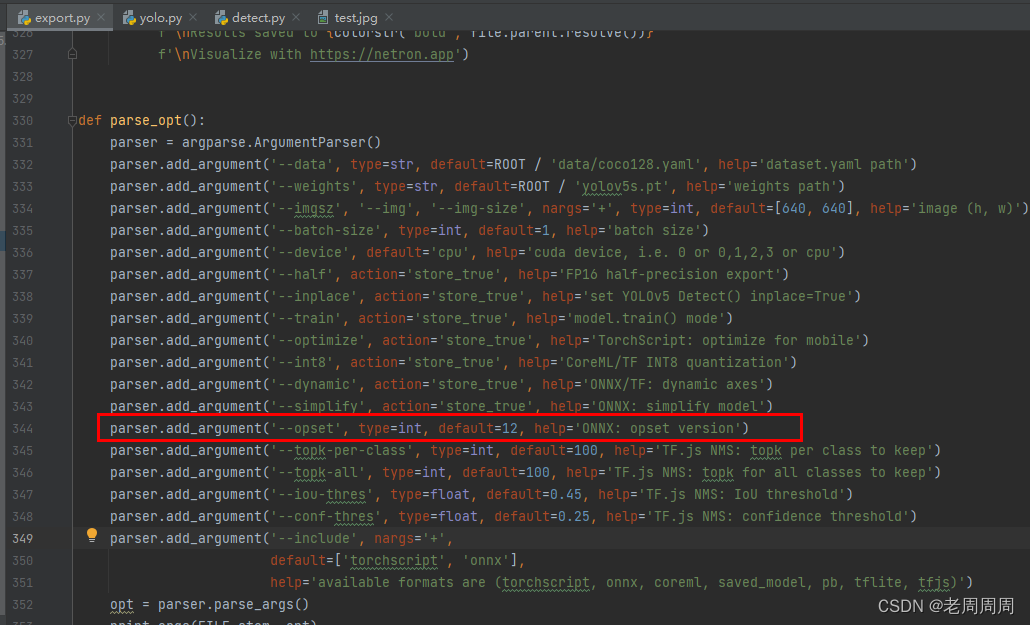 这里我们在终端输入:
这里我们在终端输入: python export.py --weights best.pt --img 640 --batch 1 --opset 12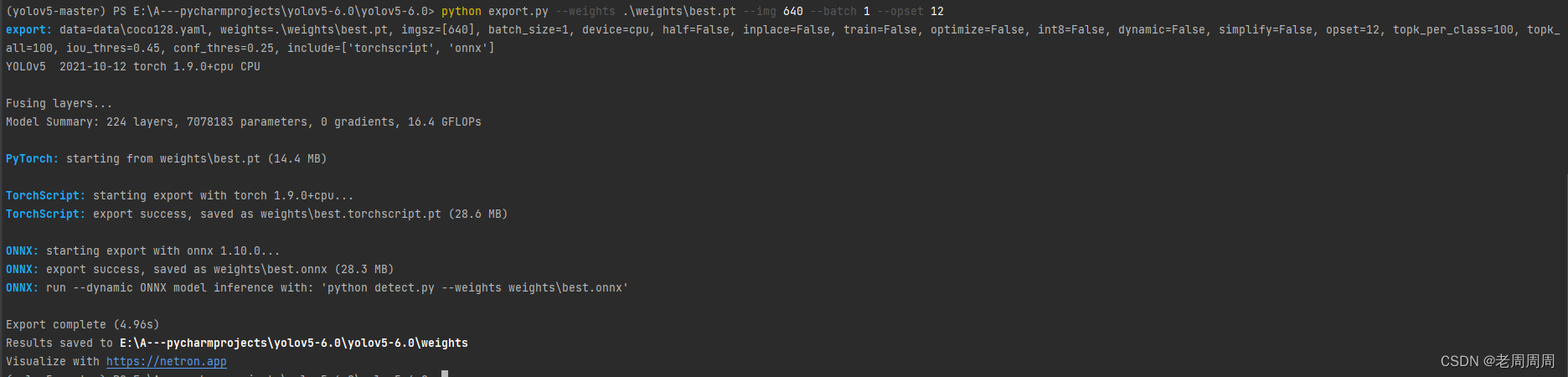
6. 这里说明我们已经转换完成了,可以查看一下该onnx模型的网络结构,使用Netron
这里观察一下自己模型的输入输出是否有问题,这里没有什么问题,准备进行下一步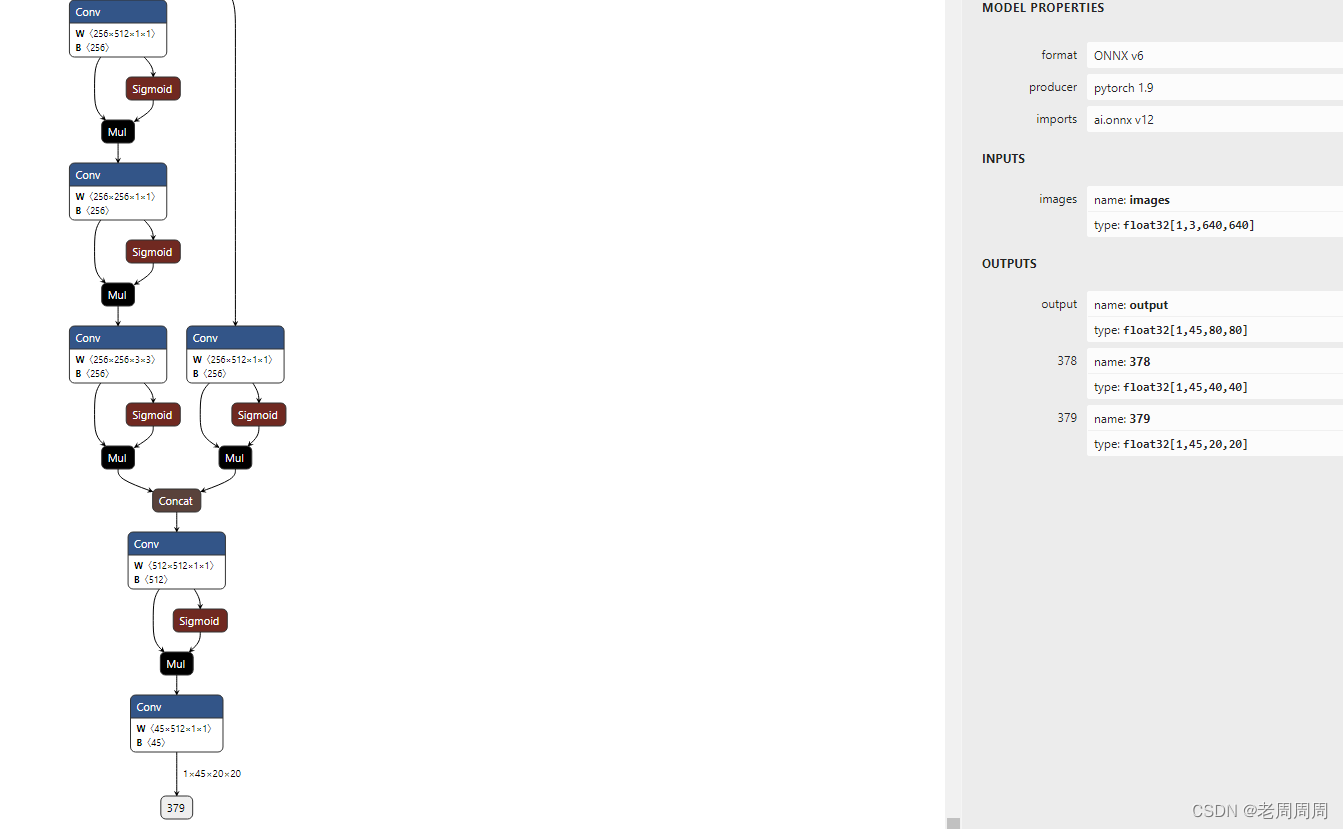
三. onnx模型转换为rknn模型
根据firefly官网的关于使用NPU的说明,我们需要先下载所需要的包,这里我们使用的是RK_NPU_SDK_1.2.0,这里面几乎含有了所有我们需要的东西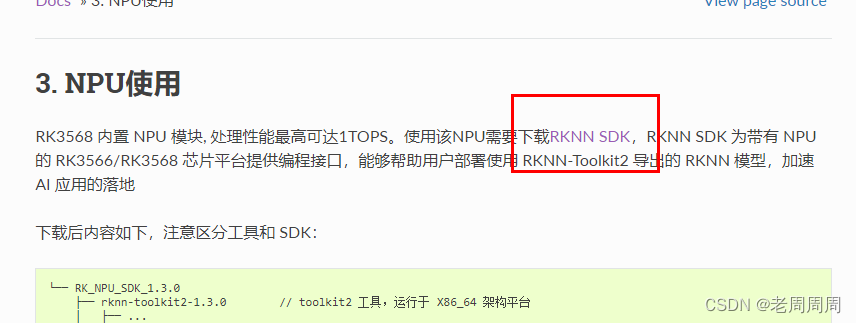
2. 下载好包,我们就需要准备环境了。通过firefly官方对于npu的说明,RKNN-Toolkit2只能用在x86 64的ubuntu系统上,版本最好是18.04,也就是说在PC上安装虚拟机,或者专门找一个x86 64 ubuntu系统的电脑,是不是很折磨。这里我们已经找了一台ubuntu方便用来转换模型,这里我们用vscode远程连接该平台,FileZilla Client方便将onnx模型文件转入该平台,这里我已经准备好了,只需要你的onnx,RK_NPU_SDK_1.2.0以及一个素材图片,为了避免出问题,我建议测试图片使用640*640的。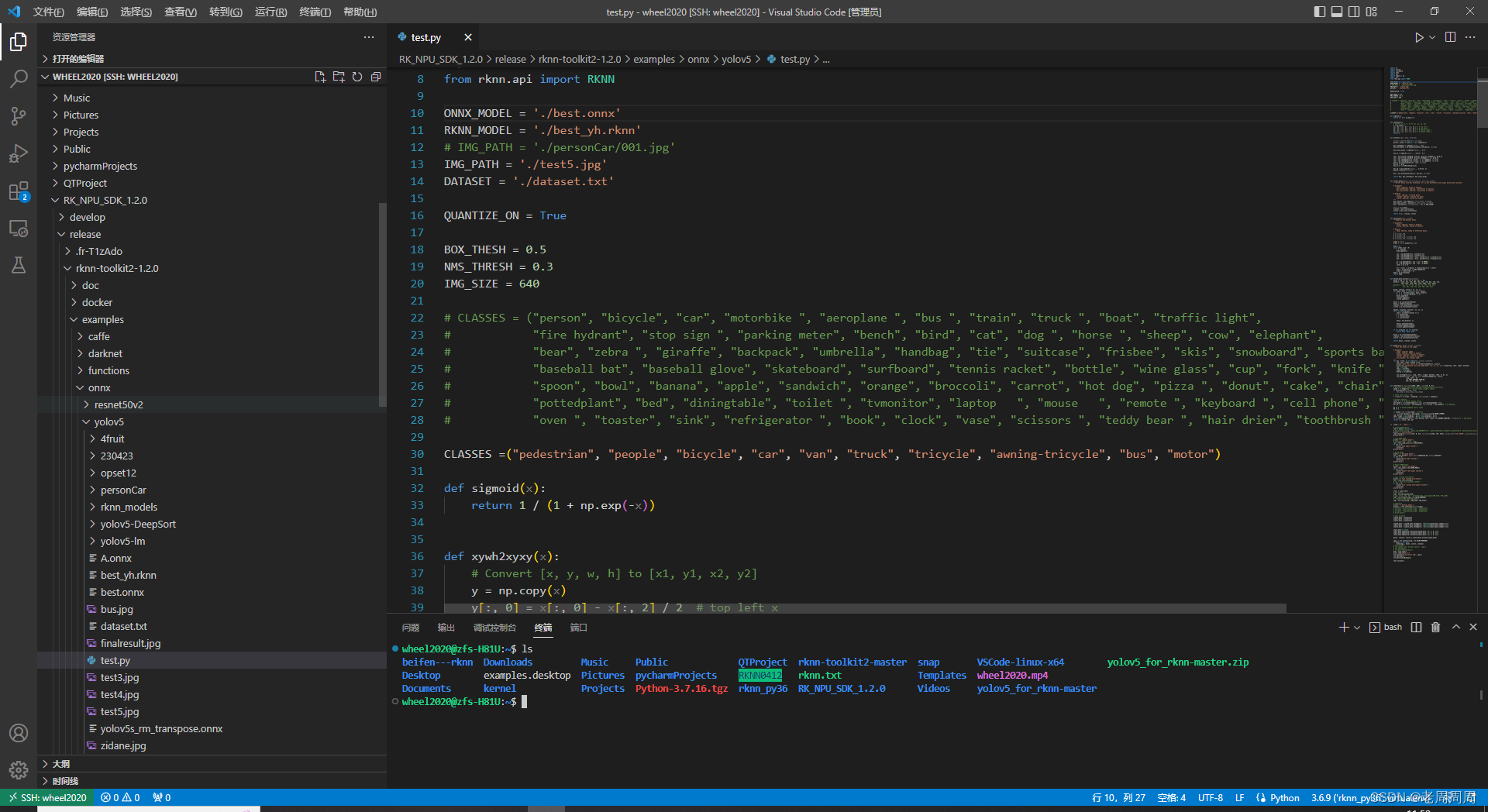
3. 这里建议是在虚拟环境中安装rknn的环境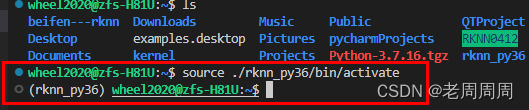
4. 我们需要安装RKNN-Toolkit2 工具以及依赖,如何安装呢,看官网
https://wiki.t-firefly.com/zh_CN/ROC-RK3568-PC-SE/usage_npu.html
安装完后就可以开始转换了。目录如下: 需要修改一下路径,包括onnx的路径以及将要生成的rknn的路径名称,测试图片的位置
需要修改一下路径,包括onnx的路径以及将要生成的rknn的路径名称,测试图片的位置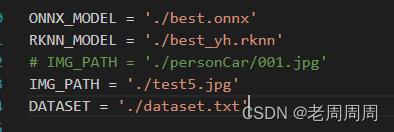 填入自己的检测目标类class
填入自己的检测目标类class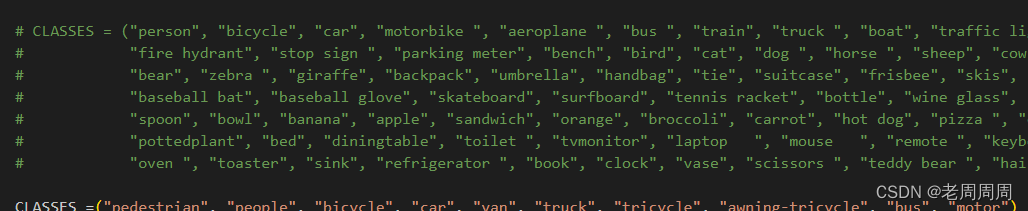 根据NPU1.2.0里面doc中的说明,需要修改rknn.config,下面的outputs要删除,如下图所示:
根据NPU1.2.0里面doc中的说明,需要修改rknn.config,下面的outputs要删除,如下图所示: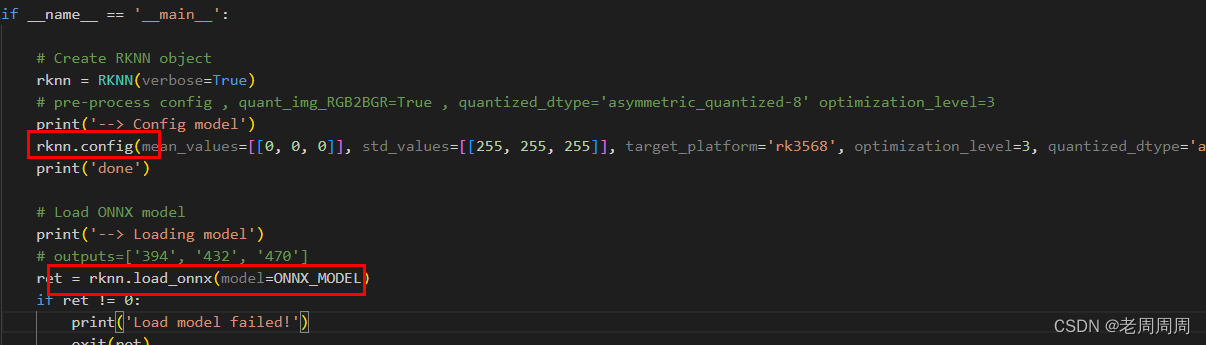
根据自己的情况修改该参数,刚开始只需要填入一个平台名字即可
rknn.config(mean_values=[[0, 0, 0]], std_values=[[255, 255, 255]], target_platform='rk3568', optimization_level=3, quantized_dtype='asymmetric_quantized-8')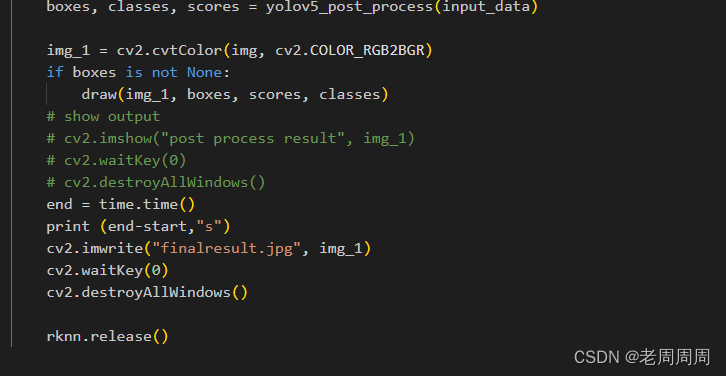
end = time.time()print (end-start,"s")cv2.imwrite("finalresult.jpg", img_1)cv2.waitKey(0)cv2.destroyAllWindows()rknn.release()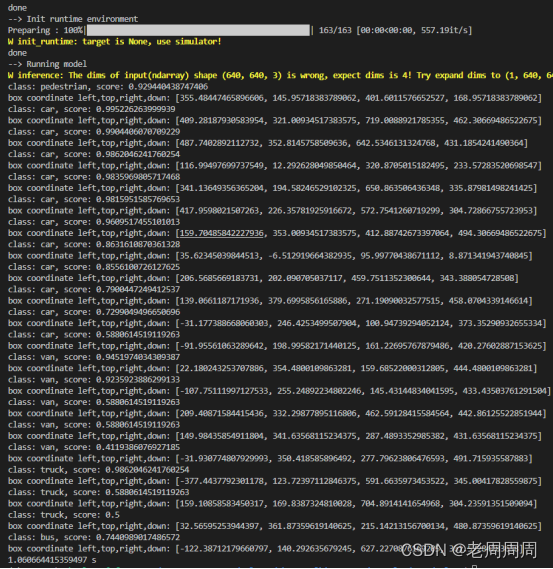
这里位置没什么问题,anchor特别大,不过onnx模型没问题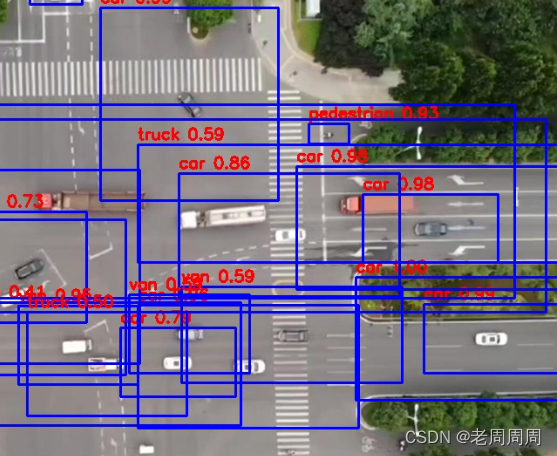
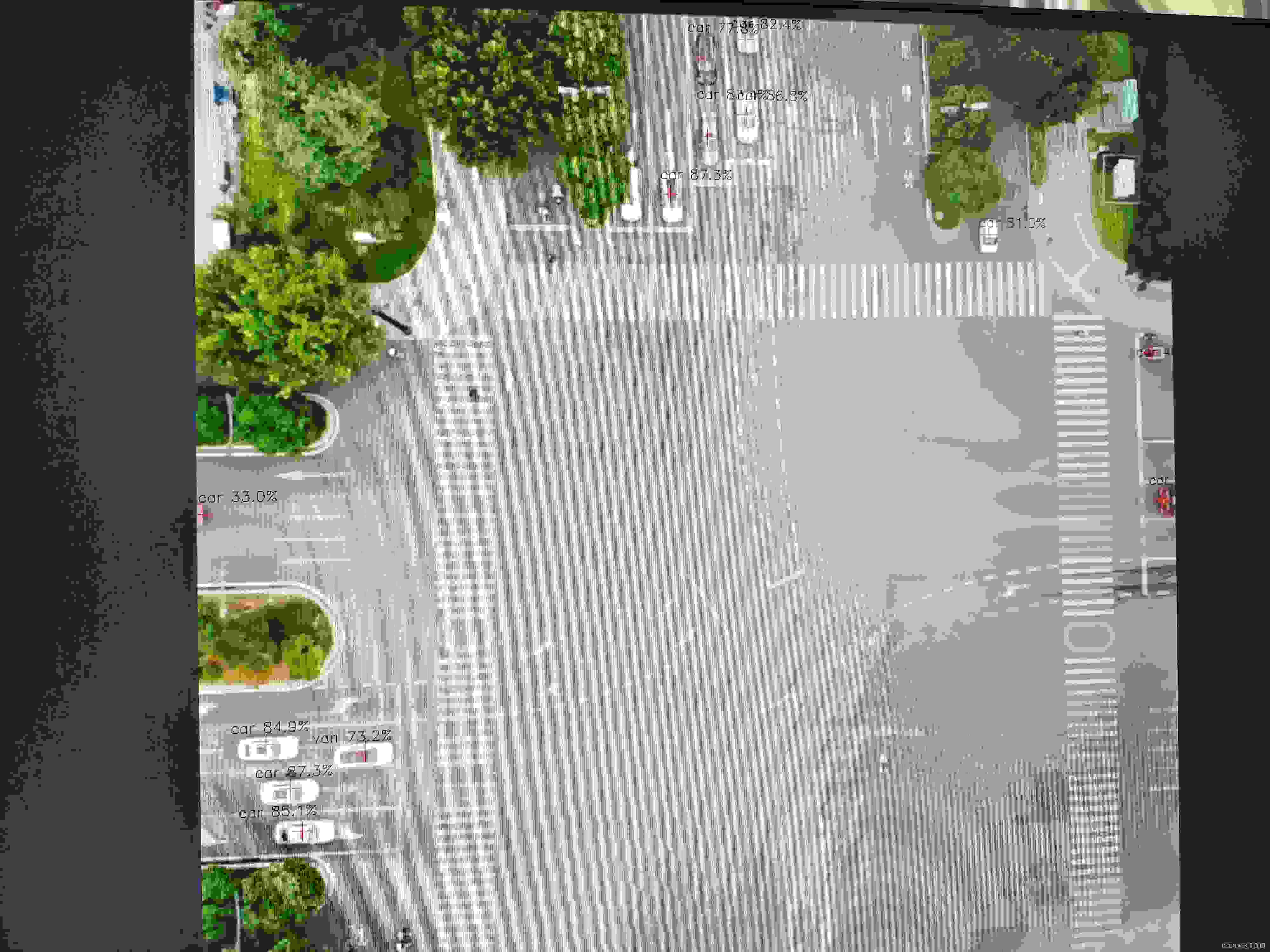
四. 测试rknn模型精度并在qt上部署
opencv多平台编译参考我的另一篇RK3568+QT5+OpenCV Debian10母板开发环境搭建自记录PS:改源后我们只下载一个东西,libjasper-dev 使用sudo apt-get install 来下载安装,(在后面测试时发现不安装编译的话后续在qtcreator中build会出现问题)随后继续换回到阿里镜像,下载编译opencv的依赖,安装完后确定一下
要注意,编译后的opencv我一般也是放在opt下面,并且给opt文件夹 777权限
2. 参考上面的文档之后你应该已经安装了qtcreator,接下来就需要一个测试程序来测试,这里用江流儿大佬改的代码测试,
https://blog.csdn.net/sxj731533730/article/details/127029969
我们简单粗暴的创建一个控制台程序项目即可,将全部代码塞到cpp中,并且创建头文件rknn_api.h,这个文件在RK_NPU_SDK1.2.0里面有
 在pro文件中需要加上我们的编译后的opencv库,如下图
在pro文件中需要加上我们的编译后的opencv库,如下图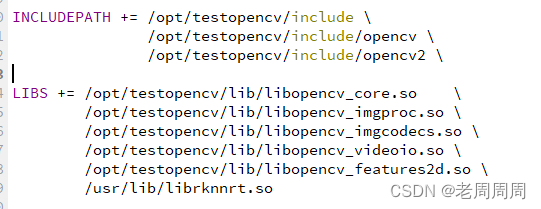 这里我们放出代码,这个只能对图片进行检测,至于视频或者摄像头要对该代码进行修改
这里我们放出代码,这个只能对图片进行检测,至于视频或者摄像头要对该代码进行修改 #include <QCoreApplication>#include <stdio.h>#include <stdint.h>#include <stdlib.h>#include <queue>#include "rknn_api.h"#include "opencv2/core/core.hpp"#include "opencv2/imgproc/imgproc.hpp"#include "opencv2/highgui/highgui.hpp"#include <chrono>#define OBJ_NAME_MAX_SIZE 16#define OBJ_NUMB_MAX_SIZE 200#define OBJ_CLASS_NUM 10#define PROP_BOX_SIZE (5+OBJ_CLASS_NUM)using namespace std;typedef struct _BOX_RECT { int left; int right; int top; int bottom;} BOX_RECT;typedef struct __detect_result_t { char name[OBJ_NAME_MAX_SIZE]; int class_index; BOX_RECT box; float prop;} detect_result_t;typedef struct _detect_result_group_t { int id; int count; detect_result_t results[OBJ_NUMB_MAX_SIZE];} detect_result_group_t;//const int anchor0[6] = {10, 13, 16, 30, 33, 23};//const int anchor1[6] = {30, 61, 62, 45, 59, 119};//const int anchor2[6] = {116, 90, 156, 198, 373, 326};const int anchor0[6] = {3, 4, 4, 8, 9, 6};const int anchor1[6] = {6, 14, 14, 10, 15, 30};const int anchor2[6] = {29, 23, 39, 50, 94, 82};void printRKNNTensor(rknn_tensor_attr *attr) { printf("index=%d name=%s n_dims=%d dims=[%d %d %d %d] n_elems=%d size=%d " "fmt=%d type=%d qnt_type=%d fl=%d zp=%d scale=%f\n", attr->index, attr->name, attr->n_dims, attr->dims[3], attr->dims[2], attr->dims[1], attr->dims[0], attr->n_elems, attr->size, 0, attr->type, attr->qnt_type, attr->fl, attr->zp, attr->scale);}float sigmoid(float x) { return 1.0 / (1.0 + expf(-x));}float unsigmoid(float y) { return -1.0 * logf((1.0 / y) - 1.0);}int process_fp(float *input, int *anchor, int grid_h, int grid_w, int height, int width, int stride, std::vector<float> &boxes, std::vector<float> &boxScores, std::vector<int> &classId, float threshold) { int validCount = 0; int grid_len = grid_h * grid_w; float thres_sigmoid = unsigmoid(threshold); for (int a = 0; a < 3; a++) { for (int i = 0; i < grid_h; i++) { for (int j = 0; j < grid_w; j++) { float box_confidence = input[(PROP_BOX_SIZE * a + 4) * grid_len + i * grid_w + j]; if (box_confidence >= thres_sigmoid) { int offset = (PROP_BOX_SIZE * a) * grid_len + i * grid_w + j; float *in_ptr = input + offset; float box_x = sigmoid(*in_ptr) * 2.0 - 0.5; float box_y = sigmoid(in_ptr[grid_len]) * 2.0 - 0.5; float box_w = sigmoid(in_ptr[2 * grid_len]) * 2.0; float box_h = sigmoid(in_ptr[3 * grid_len]) * 2.0; box_x = (box_x + j) * (float) stride; box_y = (box_y + i) * (float) stride; box_w = box_w * box_w * (float) anchor[a * 2]; box_h = box_h * box_h * (float) anchor[a * 2 + 1]; box_x -= (box_w / 2.0); box_y -= (box_h / 2.0); boxes.push_back(box_x); boxes.push_back(box_y); boxes.push_back(box_w); boxes.push_back(box_h); float maxClassProbs = in_ptr[5 * grid_len]; int maxClassId = 0; for (int k = 1; k < OBJ_CLASS_NUM; ++k) { float prob = in_ptr[(5 + k) * grid_len]; if (prob > maxClassProbs) { maxClassId = k; maxClassProbs = prob; } } float box_conf_f32 = sigmoid(box_confidence); float class_prob_f32 = sigmoid(maxClassProbs); boxScores.push_back(box_conf_f32 * class_prob_f32); classId.push_back(maxClassId); validCount++; } } } } return validCount;}float CalculateOverlap(float xmin0, float ymin0, float xmax0, float ymax0, float xmin1, float ymin1, float xmax1, float ymax1) { float w = fmax(0.f, fmin(xmax0, xmax1) - fmax(xmin0, xmin1) + 1.0); float h = fmax(0.f, fmin(ymax0, ymax1) - fmax(ymin0, ymin1) + 1.0); float i = w * h; float u = (xmax0 - xmin0 + 1.0) * (ymax0 - ymin0 + 1.0) + (xmax1 - xmin1 + 1.0) * (ymax1 - ymin1 + 1.0) - i; return u <= 0.f ? 0.f : (i / u);}int nms(int validCount, std::vector<float> &outputLocations, std::vector<int> &order, float threshold) { for (int i = 0; i < validCount; ++i) { if (order[i] == -1) { continue; } int n = order[i]; for (int j = i + 1; j < validCount; ++j) { int m = order[j]; if (m == -1) { continue; } float xmin0 = outputLocations[n * 4 + 0]; float ymin0 = outputLocations[n * 4 + 1]; float xmax0 = outputLocations[n * 4 + 0] + outputLocations[n * 4 + 2]; float ymax0 = outputLocations[n * 4 + 1] + outputLocations[n * 4 + 3]; float xmin1 = outputLocations[m * 4 + 0]; float ymin1 = outputLocations[m * 4 + 1]; float xmax1 = outputLocations[m * 4 + 0] + outputLocations[m * 4 + 2]; float ymax1 = outputLocations[m * 4 + 1] + outputLocations[m * 4 + 3]; float iou = CalculateOverlap(xmin0, ymin0, xmax0, ymax0, xmin1, ymin1, xmax1, ymax1); if (iou > threshold) { order[j] = -1; } } } return 0;}int quick_sort_indice_inverse( std::vector<float> &input, int left, int right, std::vector<int> &indices) { float key; int key_index; int low = left; int high = right; if (left < right) { key_index = indices[left]; key = input[left]; while (low < high) { while (low < high && input[high] <= key) { high--; } input[low] = input[high]; indices[low] = indices[high]; while (low < high && input[low] >= key) { low++; } input[high] = input[low]; indices[high] = indices[low]; } input[low] = key; indices[low] = key_index; quick_sort_indice_inverse(input, left, low - 1, indices); quick_sort_indice_inverse(input, low + 1, right, indices); } return low;}int clamp(float val, int min, int max) { return val > min ? (val < max ? val : max) : min;}int post_process_fp(float *input0, float *input1, float *input2, int model_in_h, int model_in_w, int h_offset, int w_offset, float resize_scale, float conf_threshold, float nms_threshold, detect_result_group_t *group, const char *labels[]) { memset(group, 0, sizeof(detect_result_group_t)); std::vector<float> filterBoxes; std::vector<float> boxesScore; std::vector<int> classId; int stride0 = 8; int grid_h0 = model_in_h / stride0; int grid_w0 = model_in_w / stride0; int validCount0 = 0; validCount0 = process_fp(input0, (int *) anchor0, grid_h0, grid_w0, model_in_h, model_in_w, stride0, filterBoxes, boxesScore, classId, conf_threshold); int stride1 = 16; int grid_h1 = model_in_h / stride1; int grid_w1 = model_in_w / stride1; int validCount1 = 0; validCount1 = process_fp(input1, (int *) anchor1, grid_h1, grid_w1, model_in_h, model_in_w, stride1, filterBoxes, boxesScore, classId, conf_threshold); int stride2 = 32; int grid_h2 = model_in_h / stride2; int grid_w2 = model_in_w / stride2; int validCount2 = 0; validCount2 = process_fp(input2, (int *) anchor2, grid_h2, grid_w2, model_in_h, model_in_w, stride2, filterBoxes, boxesScore, classId, conf_threshold); int validCount = validCount0 + validCount1 + validCount2; // no object detect if (validCount <= 0) { return 0; } std::vector<int> indexArray; for (int i = 0; i < validCount; ++i) { indexArray.push_back(i); } quick_sort_indice_inverse(boxesScore, 0, validCount - 1, indexArray); nms(validCount, filterBoxes, indexArray, nms_threshold); int last_count = 0; /* box valid detect target */ for (int i = 0; i < validCount; ++i) { if (indexArray[i] == -1 || boxesScore[i] < conf_threshold || last_count >= OBJ_NUMB_MAX_SIZE) { continue; } int n = indexArray[i]; float x1 = filterBoxes[n * 4 + 0]; float y1 = filterBoxes[n * 4 + 1]; float x2 = x1 + filterBoxes[n * 4 + 2]; float y2 = y1 + filterBoxes[n * 4 + 3]; int id = classId[n]; group->results[last_count].box.left = (int) ((clamp(x1, 0, model_in_w) - w_offset) / resize_scale); group->results[last_count].box.top = (int) ((clamp(y1, 0, model_in_h) - h_offset) / resize_scale); group->results[last_count].box.right = (int) ((clamp(x2, 0, model_in_w) - w_offset) / resize_scale); group->results[last_count].box.bottom = (int) ((clamp(y2, 0, model_in_h) - h_offset) / resize_scale); group->results[last_count].prop = boxesScore[i]; group->results[last_count].class_index = id; const char *label = labels[id]; strncpy(group->results[last_count].name, label, OBJ_NAME_MAX_SIZE); // printf("result %2d: (%4d, %4d, %4d, %4d), %s\n", i, group->results[last_count].box.left, group->results[last_count].box.top, // group->results[last_count].box.right, group->results[last_count].box.bottom, label); last_count++; } group->count = last_count; return 0;}float deqnt_affine_to_f32(uint8_t qnt, uint8_t zp, float scale) { return ((float) qnt - (float) zp) * scale;}int32_t __clip(float val, float min, float max) { float f = val <= min ? min : (val >= max ? max : val); return f;}uint8_t qnt_f32_to_affine(float f32, uint8_t zp, float scale) { float dst_val = (f32 / scale) + zp; uint8_t res = (uint8_t) __clip(dst_val, 0, 255); return res;}int process_u8(uint8_t *input, int *anchor, int grid_h, int grid_w, int height, int width, int stride, std::vector<float> &boxes, std::vector<float> &boxScores, std::vector<int> &classId, float threshold, uint8_t zp, float scale) { int validCount = 0; int grid_len = grid_h * grid_w; float thres = unsigmoid(threshold); uint8_t thres_u8 = qnt_f32_to_affine(thres, zp, scale); for (int a = 0; a < 3; a++) { for (int i = 0; i < grid_h; i++) { for (int j = 0; j < grid_w; j++) { uint8_t box_confidence = input[(PROP_BOX_SIZE * a + 4) * grid_len + i * grid_w + j]; if (box_confidence >= thres_u8) { int offset = (PROP_BOX_SIZE * a) * grid_len + i * grid_w + j; uint8_t *in_ptr = input + offset; float box_x = sigmoid(deqnt_affine_to_f32(*in_ptr, zp, scale)) * 2.0 - 0.5; float box_y = sigmoid(deqnt_affine_to_f32(in_ptr[grid_len], zp, scale)) * 2.0 - 0.5; float box_w = sigmoid(deqnt_affine_to_f32(in_ptr[2 * grid_len], zp, scale)) * 2.0; float box_h = sigmoid(deqnt_affine_to_f32(in_ptr[3 * grid_len], zp, scale)) * 2.0; box_x = (box_x + j) * (float) stride; box_y = (box_y + i) * (float) stride; box_w = box_w * box_w * (float) anchor[a * 2]; box_h = box_h * box_h * (float) anchor[a * 2 + 1]; box_x -= (box_w / 2.0); box_y -= (box_h / 2.0); boxes.push_back(box_x); boxes.push_back(box_y); boxes.push_back(box_w); boxes.push_back(box_h); uint8_t maxClassProbs = in_ptr[5 * grid_len]; int maxClassId = 0; for (int k = 1; k < OBJ_CLASS_NUM; ++k) { uint8_t prob = in_ptr[(5 + k) * grid_len]; if (prob > maxClassProbs) { maxClassId = k; maxClassProbs = prob; } } float box_conf_f32 = sigmoid(deqnt_affine_to_f32(box_confidence, zp, scale)); float class_prob_f32 = sigmoid(deqnt_affine_to_f32(maxClassProbs, zp, scale)); boxScores.push_back(box_conf_f32 * class_prob_f32); classId.push_back(maxClassId); validCount++; } } } } return validCount;}int post_process_u8(uint8_t *input0, uint8_t *input1, uint8_t *input2, int model_in_h, int model_in_w, int h_offset, int w_offset, float resize_scale, float conf_threshold, float nms_threshold, std::vector<uint8_t> &qnt_zps, std::vector<float> &qnt_scales, detect_result_group_t *group, const char *labels[]) { memset(group, 0, sizeof(detect_result_group_t)); std::vector<float> filterBoxes; std::vector<float> boxesScore; std::vector<int> classId; int stride0 = 8; int grid_h0 = model_in_h / stride0; int grid_w0 = model_in_w / stride0; int validCount0 = 0; validCount0 = process_u8(input0, (int *) anchor0, grid_h0, grid_w0, model_in_h, model_in_w, stride0, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[0], qnt_scales[0]); int stride1 = 16; int grid_h1 = model_in_h / stride1; int grid_w1 = model_in_w / stride1; int validCount1 = 0; validCount1 = process_u8(input1, (int *) anchor1, grid_h1, grid_w1, model_in_h, model_in_w, stride1, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[1], qnt_scales[1]); int stride2 = 32; int grid_h2 = model_in_h / stride2; int grid_w2 = model_in_w / stride2; int validCount2 = 0; validCount2 = process_u8(input2, (int *) anchor2, grid_h2, grid_w2, model_in_h, model_in_w, stride2, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[2], qnt_scales[2]); int validCount = validCount0 + validCount1 + validCount2; // no object detect if (validCount <= 0) { return 0; } std::vector<int> indexArray; for (int i = 0; i < validCount; ++i) { indexArray.push_back(i); } quick_sort_indice_inverse(boxesScore, 0, validCount - 1, indexArray); nms(validCount, filterBoxes, indexArray, nms_threshold); int last_count = 0; group->count = 0; /* box valid detect target */ for (int i = 0; i < validCount; ++i) { if (indexArray[i] == -1 || boxesScore[i] < conf_threshold || last_count >= OBJ_NUMB_MAX_SIZE) { continue; } int n = indexArray[i]; float x1 = filterBoxes[n * 4 + 0]; float y1 = filterBoxes[n * 4 + 1]; float x2 = x1 + filterBoxes[n * 4 + 2]; float y2 = y1 + filterBoxes[n * 4 + 3]; int id = classId[n]; group->results[last_count].box.left = (int) ((clamp(x1, 0, model_in_w) - w_offset) / resize_scale); group->results[last_count].box.top = (int) ((clamp(y1, 0, model_in_h) - h_offset) / resize_scale); group->results[last_count].box.right = (int) ((clamp(x2, 0, model_in_w) - w_offset) / resize_scale); group->results[last_count].box.bottom = (int) ((clamp(y2, 0, model_in_h) - h_offset) / resize_scale); group->results[last_count].prop = boxesScore[i]; group->results[last_count].class_index = id; const char *label = labels[id]; strncpy(group->results[last_count].name, label, OBJ_NAME_MAX_SIZE); // printf("result %2d: (%4d, %4d, %4d, %4d), %s\n", i, group->results[last_count].box.left, group->results[last_count].box.top, // group->results[last_count].box.right, group->results[last_count].box.bottom, label); last_count++; } group->count = last_count; return 0;}void letterbox(cv::Mat rgb,cv::Mat &img_resize,int target_width,int target_height){ float shape_0=rgb.rows; float shape_1=rgb.cols; float new_shape_0=target_height; float new_shape_1=target_width; float r=std::min(new_shape_0/shape_0,new_shape_1/shape_1); float new_unpad_0=int(round(shape_1*r)); float new_unpad_1=int(round(shape_0*r)); float dw=new_shape_1-new_unpad_0; float dh=new_shape_0-new_unpad_1; dw=dw/2; dh=dh/2; cv::Mat copy_rgb=rgb.clone(); if(int(shape_0)!=int(new_unpad_0)&&int(shape_1)!=int(new_unpad_1)){ cv::resize(copy_rgb,img_resize,cv::Size(new_unpad_0,new_unpad_1)); copy_rgb=img_resize; } int top=int(round(dh-0.1)); int bottom=int(round(dh+0.1)); int left=int(round(dw-0.1)); int right=int(round(dw+0.1)); cv::copyMakeBorder(copy_rgb, img_resize,top, bottom, left, right, cv::BORDER_CONSTANT, cv::Scalar(0,0,0));}int main(int argc, char **argv) { const char *img_path = "/opt/testPictures/test4.jpg"; //const char *img_path = "/opt/personCar/002.jpg"; const char *model_path = "/opt/model/RK356X/best.rknn"; const char *post_process_type = "fp";//fp const int target_width = 640; const int target_height = 640; const char *image_process_mode = "letter_box"; float resize_scale = 0; int h_pad=0; int w_pad=0; const float nms_threshold = 0.2; const float conf_threshold = 0.3;// const char *labels[] = {"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat",// "traffic light",// "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse",// "sheep", "cow",// "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie",// "suitcase", "frisbee",// "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove",// "skateboard", "surfboard",// "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",// "banana", "apple",// "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake",// "chair", "couch",// "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote",// "keyboard", "cell phone",// "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase",// "scissors", "teddy bear",// "hair drier", "toothbrush"}; const char *labels[] = {"pedestrian", "people", "bicycle", "car", "van", "truck", "tricycle", "awning-tricycle", "bus", "motor"}; // Load image cv::Mat bgr = cv::imread(img_path); if (!bgr.data) { printf("cv::imread %s fail!\n", img_path); return -1; } cv::Mat rgb; //BGR->RGB cv::cvtColor(bgr, rgb, cv::COLOR_BGR2RGB); cv::Mat img_resize; float correction[2] = {0, 0}; float scale_factor[] = {0, 0}; int width=rgb.cols; int height=rgb.rows; // Letter box resize float img_wh_ratio = (float) width / (float) height; float input_wh_ratio = (float) target_width / (float) target_height; int resize_width; int resize_height; if (img_wh_ratio >= input_wh_ratio) { //pad height dim resize_scale = (float) target_width / (float) width; resize_width = target_width; resize_height = (int) ((float) height * resize_scale); w_pad = 0; h_pad = (target_height - resize_height) / 2; } else { //pad width dim resize_scale = (float) target_height / (float) height; resize_width = (int) ((float) width * resize_scale); resize_height = target_height; w_pad = (target_width - resize_width) / 2;; h_pad = 0; } if(strcmp(image_process_mode,"letter_box")==0){ letterbox(rgb,img_resize,target_width,target_height); }else { cv::resize(rgb, img_resize, cv::Size(target_width, target_height)); } // Load model FILE *fp = fopen(model_path, "rb"); if (fp == NULL) { printf("fopen %s fail!\n", model_path); return -1; } fseek(fp, 0, SEEK_END); int model_len = ftell(fp); void *model = malloc(model_len); fseek(fp, 0, SEEK_SET); if (model_len != fread(model, 1, model_len, fp)) { printf("fread %s fail!\n", model_path); free(model); return -1; } rknn_context ctx = 0; int ret = rknn_init(&ctx, model, model_len, 0,0); if (ret < 0) { printf("rknn_init fail! ret=%d\n", ret); return -1; } /* Query sdk version */ rknn_sdk_version version; ret = rknn_query(ctx, RKNN_QUERY_SDK_VERSION, &version, sizeof(rknn_sdk_version)); if (ret < 0) { printf("rknn_init error ret=%d\n", ret); return -1; } printf("sdk version: %s driver version: %s\n", version.api_version, version.drv_version); /* Get input,output attr */ rknn_input_output_num io_num; ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num)); if (ret < 0) { printf("rknn_init error ret=%d\n", ret); return -1; } printf("model input num: %d, output num: %d\n", io_num.n_input, io_num.n_output); rknn_tensor_attr input_attrs[io_num.n_input]; memset(input_attrs, 0, sizeof(input_attrs)); for (int i = 0; i < io_num.n_input; i++) { input_attrs[i].index = i; ret = rknn_query(ctx, RKNN_QUERY_INPUT_ATTR, &(input_attrs[i]), sizeof(rknn_tensor_attr)); if (ret < 0) { printf("rknn_init error ret=%d\n", ret); return -1; } printRKNNTensor(&(input_attrs[i])); } rknn_tensor_attr output_attrs[io_num.n_output]; memset(output_attrs, 0, sizeof(output_attrs)); for (int i = 0; i < io_num.n_output; i++) { output_attrs[i].index = i; ret = rknn_query(ctx, RKNN_QUERY_OUTPUT_ATTR, &(output_attrs[i]), sizeof(rknn_tensor_attr)); printRKNNTensor(&(output_attrs[i])); } int input_channel = 3; int input_width = 0; int input_height = 0; if (input_attrs[0].fmt == RKNN_TENSOR_NCHW) { printf("model is NCHW input fmt\n"); input_width = input_attrs[0].dims[0]; input_height = input_attrs[0].dims[1]; printf("input_width=%d input_height=%d\n", input_width, input_height); } else { printf("model is NHWC input fmt\n"); input_width = input_attrs[0].dims[1]; input_height = input_attrs[0].dims[2]; printf("input_width=%d input_height=%d\n", input_width, input_height); } printf("model input height=%d, width=%d, channel=%d\n", input_height, input_width, input_channel);/* Init input tensor */ rknn_input inputs[1]; memset(inputs, 0, sizeof(inputs)); inputs[0].index = 0; inputs[0].buf = img_resize.data; inputs[0].type = RKNN_TENSOR_UINT8; inputs[0].size = input_width * input_height * input_channel; inputs[0].fmt = RKNN_TENSOR_NHWC; inputs[0].pass_through = 0; /* Init output tensor */ rknn_output outputs[io_num.n_output]; memset(outputs, 0, sizeof(outputs)); for (int i = 0; i < io_num.n_output; i++) { if (strcmp(post_process_type, "fp") == 0) { outputs[i].want_float = 1; } else if (strcmp(post_process_type, "u8") == 0) { outputs[i].want_float = 0; } } printf("img.cols: %d, img.rows: %d\n", img_resize.cols, img_resize.rows); auto t1=std::chrono::steady_clock::now(); rknn_inputs_set(ctx, io_num.n_input, inputs); ret = rknn_run(ctx, NULL); if (ret < 0) { printf("ctx error ret=%d\n", ret); return -1; } ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL); if (ret < 0) { printf("outputs error ret=%d\n", ret); return -1; } /* Post process */ std::vector<float> out_scales; std::vector<uint8_t> out_zps; for (int i = 0; i < io_num.n_output; ++i) { out_scales.push_back(output_attrs[i].scale); out_zps.push_back(output_attrs[i].zp); } detect_result_group_t detect_result_group; if (strcmp(post_process_type, "u8") == 0) { post_process_u8((uint8_t *) outputs[0].buf, (uint8_t *) outputs[1].buf, (uint8_t *) outputs[2].buf, input_height, input_width, h_pad, w_pad, resize_scale, conf_threshold, nms_threshold, out_zps, out_scales, &detect_result_group, labels); } else if (strcmp(post_process_type, "fp") == 0) { post_process_fp((float *) outputs[0].buf, (float *) outputs[1].buf, (float *) outputs[2].buf, input_height, input_width, h_pad, w_pad, resize_scale, conf_threshold, nms_threshold, &detect_result_group, labels); }//毫秒级 auto t2=std::chrono::steady_clock::now(); double dr_ms=std::chrono::duration<double,std::milli>(t2-t1).count(); printf("%lf ms\n",dr_ms); for (int i = 0; i < detect_result_group.count; i++) { detect_result_t *det_result = &(detect_result_group.results[i]); printf("%s @ (%d %d %d %d) %f\n", det_result->name, det_result->box.left, det_result->box.top, det_result->box.right, det_result->box.bottom, det_result->prop); int bx1 = det_result->box.left; int by1 = det_result->box.top; int bx2 = det_result->box.right; int by2 = det_result->box.bottom; cv::rectangle(bgr, cv::Point(bx1, by1), cv::Point(bx2, by2), cv::Scalar(231, 232, 143)); //两点的方式 char text[256]; sprintf(text, "%s %.1f%% ", det_result->name, det_result->prop * 100); int baseLine = 0; cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine); int x = bx1; int y = by1 - label_size.height - baseLine; if (y < 0) y = 0; if (x + label_size.width > bgr.cols) x = bgr.cols - label_size.width; cv::rectangle(bgr, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)), cv::Scalar(0, 0, 255), -1); cv::putText(bgr, text, cv::Point(x, y + label_size.height), cv::FONT_HERSHEY_DUPLEX, 0.4, cv::Scalar(255, 255, 255), 1, cv::LINE_AA); cv::imwrite("bgr9.jpg", bgr); } ret = rknn_outputs_release(ctx, io_num.n_output, outputs); if (ret < 0) { printf("rknn_query fail! ret=%d\n", ret); goto Error; } Error: if (ctx > 0) rknn_destroy(ctx); if (model) free(model); if (fp) fclose(fp); return 0;}