文/李根 ligen@qbitai.com
量子位 出品 | 公众号 QbitAI
自动驾驶=无事故?
蔚来首例NIO Pilot致死车祸后,关于自动驾驶安全相关的话题讨论,愈演愈烈,一场信任危机正在殃及所有玩家。
甚至还形成了两极代表观点:
一极认为,“自动驾驶事故”面前,应该对所有的自动驾驶展开重估,因为技术能力有如此明显缺陷,人命关天。应该叫停研发,禁止推广,从根本上杜绝类似事故。
另一极强调,辅助驾驶的锅,不能让自动驾驶背,“真正的自动驾驶”就会有绝对的安全,自动驾驶=无事故。
一方限制,另一方辩护。
但对不起,都存在认知偏差,都可能阻碍一项利国利民造福人类的新技术健康发展。
既不能因噎废食,也不宜把自动驾驶与零事故划上等号。
不过确实是时候,正本清源,厘清技术野蛮生长期里遗留的种种历史问题了。
自动驾驶历史遗留问题?
最首要的就是自动驾驶技术等级划分,以及翻译用语加剧的“误解”。
就在蔚来事故热议中,理想汽车创始人李想、投资入局造车的360董事长周鸿祎,以及威马汽车创始人沈晖,也都是围绕自动驾驶技术等级相关的问题展开的讨论。
有人说他们是作为友商在“落井下石”,但如果深入了解了他们口诛笔伐的“专业黑话”和统一用语倡议,就会真切感知——他们这是唇亡齿寒危机感下的自发自救。
因为自动驾驶技术等级相关的历史遗留问题一日不明,行业野蛮生长、劣币驱逐良币的现状就会始终得不到改变。
所谓的自动驾驶技术等级,核心就是这张图:
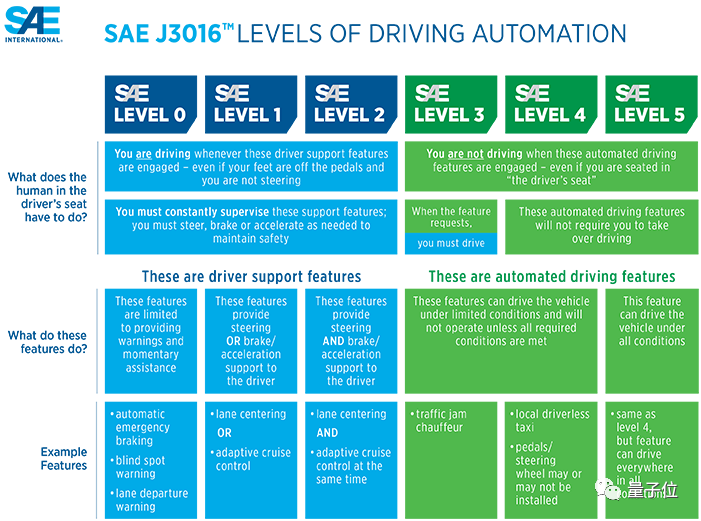
其中的level(水平\等级),就是L几的“行业技术黑话”。
L2,就是level 2,也就是第二等级水平。
L3,就是level 3,也就是第三等级水平。
这套“等级”标准,跟一家名叫Society of Automotive Engineers的组织有关,简称SAE,中文叫美国工程师学会。
在2014年全球自动驾驶研发,开始第一次欣欣向荣之际,SAE牵头制定了一套自动驾驶技术等级标准。
目标是希望通过划定不同的等级,可以指引行业针对性发展。
整个等级标准的制定,参考了很多影响因素。
但最核心的可以归纳为一个:
AI系统在汽车驾驶中的参与程度。
整个标准,被分为了6个级别。
0、1、2、3、4、5。
L0,AI参与程度最低,基本就是应急情况下辅助一下。
L5,AI参与程度最高,高到整个驾驶行为完全不需要人类的地步,也被叫做完全无人驾驶。

比如现在常听到的RoboTaxi无人驾驶出租车,或者是不再搭载刹车油门脚踏板和方向盘的智能车,就是朝着L5方向上的努力。
在这6个等级中,有一个关键分水岭——L4。
L4以下,人类驾驶员都是驾驶行为的最终责任人。
L4及以上,AI系统就是最终责任人。
L4是权责界限的分水岭。
换而言之,L4以下,无论是L2还是L3,都是人机共驾模式,AI系统提供的都是辅助能力。
区别在于,L2是你操作什么,AI就执行什么,比如车道居中保持、自适应巡航控制,以及你命令变道然后AI来伺机变道……都是L2。L2情况下,AI完全不“思考”,也不主动做决策。

而L3,最大的不同就是AI开始能帮司机做决策了。最简单的例子就是,什么时候变道,人类司机不用再给指令。
在驾驶过程中,AI会根据你的行程和路况来进行决策,甚至能在高速和环路等非开放路况的场景下,帮助完成绝大部分的驾驶行为。
只是这个阶段,人类依然是驾驶行为的核心决策者,所以特殊情况、紧急决策,依然需要人类驾驶员来执行。
所以现阶段,各家产品有叫法上的不同。
NOA、NOP、NGP……但基本都是指在高速、环路等路况相对可控的场景的AI驾驶辅助。
援引SAE制定的术语和翻译用语,他们确实可以被叫作“L2自动驾驶”、“L3自动驾驶”,甚至还有“L2.5自动驾驶”……
但归根结底,又都是辅助驾驶,都是AI提供辅助能力,最终驾驶的决定权,依然在于车主。
这也意味着,如果发生事故,提供这种“AI辅助”能力的提供方,有“最终驾驶决定权归车主”的空子可用。
问题是,自动驾驶本身已是新事物,技术等级标准更是“行业黑话”,普通车主和用户,都缺乏完备认知……加之利益相关的技术提供方,还可能在售前只谈“自动驾驶”,利用认知偏差造成误导。

这是为什么会出现“买前自动驾驶,出事辅助驾驶”,以及“车主未能正确使用”之类的神调侃、神回复。
所以现在出了事故,这套SAE技术等级标准和翻译问题,确实难辞其咎。
这也是为什么到了行业需要统一用语的时候——用户的信任和监管信心,经不起类似事故挑战了。
但客观来说,锅也不全在SAE。
因为就在2014年制定等级标准时,他们看到了RoboTaxi的终极目标,却难以预料,围绕自动驾驶技术发展,会走出不同主张的两条路线。

自动驾驶的两大路线?
特斯拉路线和Waymo路线。
最初SAE制定标准时,这两大路线,只是推进自动驾驶的不同主张。
还没到开花结果,产生实际影响的阶段。
而这两大路线,本质就是以L4作为分水岭来实践的。
刚才也说了,L4是一个——人类是否在驾驶行为中起决定性作用——的分界线。

其中,以特斯拉为代表,希望从L4以下迭代到L4以上,后来被称为量产自动驾驶。
以谷歌集团中的Waymo为代表,则认定只有直接从L4开始,才是符合“安全初心”的做法,后来进一步作为区分被称为完全无人驾驶。
两大主张和路线之间,也时常你攻我伐,口水仗一直未间断。
而且这两大路线的开创者和最早实践者,其实都是谷歌。
但后来,谷歌认定不能走后来被称为“特斯拉路线”的方案。

因为特斯拉路线,认为自动驾驶可以在人机共驾的状态下、在驾驶数据迭代下,不断向上升级,最终从L2一直升级到L5。
特斯拉所谓的“影子模式”,就是在这种人机共驾的状态下,让AI学习人类的驾驶行为。
比如处于AI驾驶状态时,忽然遭遇了困难,由人类接管完成了挑战,就会被系统标记,其后由AI模型训练和学习类似的问题,然后得到模型提升。

实际上,特斯拉路线也不断展现其可能性和可行性。
从这几年来看,特斯拉的自动驾驶能力,进步确实有目共睹。
而且特斯拉路线的优势,集中体现在成本和规模化数据迭代上。
车卖到的地方,就是它开启自动驾驶“路测”的地方。核心要求是能卖更多车,并且“自动驾驶”方案的软硬件成本,在用户可承受范围内。
另外,特斯拉路线也存在明显的悖论。
一方面,量产自动驾驶可以替代人类车主在一些场景下驾驶,但另一方面又要求司机在紧急情况下接管汽车。
这就要求一个长时间放松的人,必须还要时刻专注在车程中。

换一个更多人有过的经验,上课允许走神,但只要老师点名提问,就能马上给出答案。
很多车主的血泪经历说明,处于放松状态的司机,会看视频、会睡着,而且过度信任特斯拉视觉感知系统的能力。
于是当“老师点名提问”来临,他们往往措手不及。
然而,开车上路,事关生命安全,代价有时是极其惨重的。
之前马斯克说,车主用了自动驾驶就回不去了。
被吐槽说,有些车主确实“回不去了”。
而且这个悖论下,特斯拉不是个例。
只要是人机共驾状态下,你不能要求所有司机,一边状态放松,另一边还能随时接管。
人,一直是驾驶行为中最不确定的因素。

也正是出于人性和“悖论”的洞察,谷歌(Waymo)主动改弦更张,决定挑战更难的完全无人驾驶路线。
作为全球这一波自动驾驶商用浪潮的开创者,谷歌最初也是希望打造一套人机共驾的系统,逐步实现RoboTaxi的L5终极目标。
但后来研发和测试阶段,就发现驾驶决策中只要有最大不可控因素——人类——存在,就没有真正的安全保障可言。
当时随着研发的系统越来越完善,测试车上路后被接管的次数越来越少,导致有些工程师干脆跑到后座去……
于是谷歌开始重新思考自动驾驶的推进路线。
因为从初心来讲,谷歌决定重金砸向自动驾驶,就是为了用稳定娴熟的AI驾驶,提高人类整体驾驶水平,有效减少大量的交通事故。
安全既是出发点,也是最终归宿。
但如果无法100%控制全局,比如即便相对成熟的AI驾驶系统给了一个不太负责任的人类司机,最后由于司机过度信任,在遭遇极端场景时无法有效接管,就会造成安全事故。
当然,也有一种说法,“事故”也是AI系统debug的过程。
但用这样的方式来推进自动驾驶,一将功成万骨枯,是不是太过冷酷无情?

所以谷歌之所以是谷歌,并非没有原因,他们决定选择更难的一条路:
直接L4。
直接把代表不确定因素的人类,从驾驶位上赶下来。最终产品形态,就是RoboTaxi。
于是这条直接L4的路线,也就被叫做Waymo路线。
这是一条先路测,在一个足够安全有保障的成熟系统之后,再开启量产和商用的路线。
这条路线优点显而易见,安全至上,成本优先级不算高,可以用最冗余的传感器方案来保障安全——毕竟车不面向C端销售。
但缺点也很明显,推进起来没那么快,商业化和规模化的速度,也严格受限。
在Waymo路线上,所有的研发、落地成本,都需要自己承担,规模化盈利,更是遥遥无期。
所以这2年来,特斯拉和Waymo在资本市场遭遇了两极待遇。
特斯拉市值股价节节高升,Waymo的估值被一而再下调。

而也是这种此消彼长之间,还长出第三种路线:
Cruise路线。
直白讲就是“融合路线”,把Waymo的“L4级自动驾驶技术”,兼顾成本之后,落在量产车上使用。
总之,一方面是看到了特斯拉路线的“数据迭代”之力,另一方面又希望通过Waymo路线来增强安全保障。
但即便如此,只要没有摆脱“人机共驾”模式,人性悖论和权责归属的问题,就始终没有消除。
安全隐患,也就无法根治。
所以问题也就来了,既然现阶段的自动驾驶无法根治安全问题,为什么还要发展?
还是烧那么多钱、给那么多有利政策来支持发展?

自动驾驶≠无事故,但只有自动驾驶才能根本上减少事故
是的,确实有理想化观点这样认为:
发展自动驾驶,让天下没有交通事故。
也对,但也不对。
对,是因为如果果真达到了理想化情况,路上皆自动驾驶车辆,或许就不会有“加塞”、“不文明驾驶”、“违规违掌”的行为了,车车都文明,车车都上路稳妥又认怂,交通秩序跟自动化流水线一样井然有序。
但之所以也不对,是因为这种理想化观点,不符合数学和技术规律。
于本质来看,自动驾驶,机器开车,是一个计算机问题,更是一个数学问题,在这道题中,始终存在一些细微的变量,让事故概率不可能完全为0。
更何况,自动驾驶面对的复杂长尾场景和状况,事故概率,也不可能为0。
所以自动驾驶=无事故,并不成立,也没有谁能打包票。
然而即便如此,自动驾驶依然有着更高的安全性,也是目前消解人类交通事故最接近本质的方法。

人类驾驶为主的交通安全,有着怎样的现状?
援引去年12月“第九个全球交通安全日”的数据,在机动车保有量超过3.6亿、机动车驾驶人达到4.5亿的中国,每年就有数万人丧生于交通事故。
更直观的换算,平均每8分钟就有1人因车祸死亡。
全球范围内,按照WHO在2018年披露的数据,全球每年因道路交通死亡人数高达135万人,意味着每25秒就有一人在交通中丧生。
其中,发生交通事故的主要原因,是最大的不确定性因素——人类司机。
无论中外,按照数据统计,肇事突出的10大交通违法行为分别为:未按规定让行、超速行驶、无证驾驶、醉酒驾驶、未与前车保持安全距离、逆行、违反交通信号、酒后驾驶、违法超车、违法会车。
同时,还有酒驾醉驾、“三超一疲劳”、闯红灯等交通违法违规行为。

但如果替换成AI司机,这些隐患行为和因素,就会从根本上被杜绝。
AI司机不仅不会有人类司机的疲劳驾驶、醉驾酒驾、情绪化,以及各种危险驾驶和不文明驾驶行为。
而且还拥有人类无法“规模化复制”的优势,一个AI老司机养成,即意味着成千上百“AI老司机”ready——相对应的是,人类从新手上路到老司机养成,绕不开线性时间和路上的磨砺。
所以大道直白,虽然自动驾驶无法保证天下再无事故,但有自动驾驶,替代了交通中最大的不确定因素,一定能让交通更安全。
此外,还有一组数据也可对比。
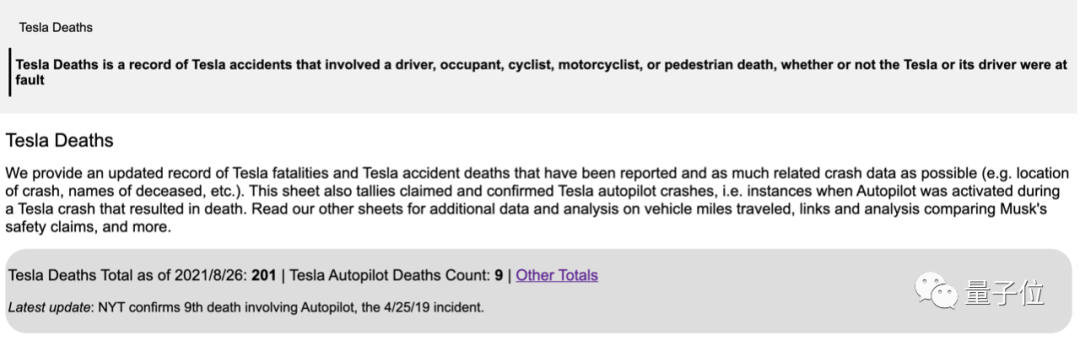
量产自动驾驶路线中,事故曝光率最高的特斯拉,凡有事故几乎无处隐藏。
所以也有好事者,统计了特斯拉及AutoPilot造成的事故和伤亡情况。
统计显示,从特斯拉2013年第一起曝光的事故至今,全球因特斯拉事故造成的死亡人数达201人,其中9人与AutoPilot相关。
Waymo路线上,全球唯一一起无人车致死车祸,由Uber测试时造成。
而对比起来,全球每年有135万人在道路交通中丧生。
虽然这几年中,自动驾驶依然是一个新业态,方兴未艾,还远未达到数量上的普及,但上述两组数据和频率,依然能见微知著。
所以即便自动驾驶≠无事故,但只有自动驾驶才能根本上减少事故。
更何况,现如今正在有越来越多冗余来加强安全。
比如车端的传感器冗余、安全冗余,运营过程中的冗余,以及中国正在高速推进的路端基建——车路协同带来的更高维度的冗余。
在这些多重冗余保障之下,如果真正来到“全部自动驾驶”状态,事故中的不确定性,还将进一步趋近于0。
有设想是,这些基础设施完善后,可以保障所有上路的车辆都由自动驾驶,不再有人机共驾,也不再有人类驾驶的车辆和自动驾驶车辆混行。
人类司机,这个道路交通上最大的不确定性因素,也就没有了。
甚至跟汽车替代马车一样,人类驾驶行为就跟骑马行为一样,变成了一种娱乐活动,甚至如果不是特许的道路,人类驾驶行为还会违规违法。
自动驾驶将完全接管城市出行网络。

这个网络中,电动车(新能源)、共享出行、车联网,以及智能化都实现了串联。
车随用随叫,可以不再需要停车,没电了自动规划去充电。
真正实现了高效、绿色、安全和低碳环保可持续,车真正变成了“使用载体”,而不是“拥有主体”,私家车从此退出历史舞台。
这个网络之下,自动驾驶车辆可以一体化运营、调度,就像现在的通信运营模式一样。
所以这也是为什么,业内还有另一个隐而未宣的观点,认为自动驾驶背后,也有5G一样的“标准”之争。
因为自动驾驶不是单一的一项技术,是一个从无到有、从个例到规模化落地的系统生态。
而且这不是一个地区、一个国家才需要的系统,是全球各地都需要的系统。
对于这个系统,谁最先拥有完备的方案和技术能力,就能成为标准的制定者,就能主导整个落地生态的发展。
也正是如此,在美国“奇货可居”的先进技术限制出口中,自动驾驶地位很高。
但自动驾驶的技术发展和迭代,离不开大规模的数据和丰富的场景。
这也是中国在自动驾驶落地上,越来越展现出优势的关键原因。

原本就跟全球处于同一起跑线,现在还有丰富和最具挑战的路况数据、场景。
所以这也是为何自动驾驶的发展,更加不能因噎废食。
因噎废食不仅无法根本上解决问题,而且还误国误民,流弊千秋。
根本上,自动驾驶不仅是一项先进技术,还事关智慧交通、智慧城市等面向未来的全球标准和话语权,甚至是经济发展和GDP的新动力引擎之一。
不过,现阶段自动驾驶发展,也不是没有安全路径上的可完善之处。
更安全发展自动驾驶,还能做什么?
既然问题已经出现,就是时候在热议中推动形成共识。
实际上,在监管和政策层面,中国可能已经是全球最谨慎的国家。
特别是在之前自动驾驶和RoboTaxi测试的资质和牌照发放中,从程序到过程,比美国加州DMV,严格太多。
根据中国目前官方唯一的自动驾驶路测报告:《北京市自动驾驶车辆道路测试报告》披露,考核标准相当严苛。
无论从公开道路的长度、还是标准制定程度上来看,都堪称细致。
还专门设置了64827公里的无人化测试验证,确认了测试技术的可行性、及测试方法和参数的可靠性。
而更早之前,有安全员的自动驾驶路测,也从牌照发放和运营等多重维度作出明确要求。
也是这种监管之下,国内路测里程最多的百度Apollo,完成多个城市RoboTaxi落地运营,有1400万公里的实路路测后,能够做到零事故。
国外,Waymo再次开行业风气之先,在去年发布了“事故报告”。
披露了从2019年初到2020年9月,RoboTaxi落地期间的事故情况。
显示在Waymo的610万英里(982万公里)路程中,包含没有安全员的完全无人驾驶的测试里程也有65000英里(10万公里),总共出现过18次事故,另外还有29次被安全员干涉得以避免的潜在事故。
但这些事故有两大共同特点:
第一,没有一起严重到危及生命。
第二,无一起主动事故,都是其他人类驾驶车辆造成的被动事故。
所以对于RoboTaxi方向上的自动驾驶,从监管到测试,一直有数据支撑的安全可信印象。
但量产自动驾驶——或者更准确来说,需要人机共驾的辅助驾驶,之前有灰色地带可走,处于野蛮生长。
一度只有道德标准,没有严格的监管法规。
但这种日子也正在成为过去时。
国内,8月12日,工信部印发了《关于加强智能网联汽车生产企业及产品准入管理的意见》,对智能车在数据和安全方面,作出了明确规定。
其中最引人注目的,就是针对涉及自动驾驶功能的产品管理,按照使用前后做了不同层级的要求明确,强化车企在安全方面的责任。
并且明确规定,自动驾驶相关的功能OTA要先过审批。
国外,特斯拉AutoPilot相关的事故,也开始被美国管理机构立案调查。
所以即便是擦边球路径上的“量产自动驾驶”,野蛮生长期也到头了。
只不过蔚来事故之前,“完全无人驾驶”和“量产自动驾驶”两大路线之间,有争论有口水仗,双方以为可以各自为战。
然而谁能想到,在事故后的不信任危机里,舆论不分“路线”,所有人都被同一条船视之。
一荣俱荣,一损俱损。没有谁能独善其身。
不管是L几的技术,不管是量产自动驾驶路线,还是完全自动驾驶路线。
不管是车厂、供应商,还是系统技术玩家。
所以一切是时候了。
是时候以这次事故为鉴,直面一直存在的认知和信任危机。
而且只有所有玩家团结一致,达成公约,才能让发展更安全、可持续。
至少是时候改变,且有三件事可以从我做起:
第一,规范使用行业用语,统一表达,明确权责归属。
但凡人机共驾,需要司机、车主紧急接管的,一律都叫辅助驾驶。
否则出现事故,无论是不是“车主未能及时接管”,都应由能力提供方承担责任。
无需司机、车主紧急接管,或者责任明确就是技术服务提供方,才能以自动驾驶作为宣传。
第二,辅助驾驶的上车,还要有多重安全冗余配合。
不仅需要在使用前,明确向车主表明辅助驾驶系统的利弊,加强功能使用端的准入考核和监管。
还需要防止不靠谱车主,轻而易举就可以绕过“辅助驾驶”开启的必要规则,以及双手离开方向盘、注意力不集中等危险驾驶行为。
此外,DMS等驾驶行为监测,应该成为辅助驾驶的标配,不仅是保护车主安全,也是保障其他路上交通参与者的安全。

私自加装“作弊器”等行为,应该要与危险驾驶行为一样被对待。还有必要主动呼吁打击销售“作弊器”的行为,呼吁立法监管,由各大零售平台打击,不能让如此等同谋财害命的行为,大行其道。
第三,定期主动披露安全机制和数据。
安全机制可以增进行业信任,“安全\事故报告”能够让一切更公开透明,唯有摆脱“谈事故色变”、“讳莫如深”的心态,行业才能真正健康良性发展。
这也是不断科普,帮助公众更加准确了解自动驾驶能力、状态和阶段的必要手段。
总之,事故当前,信任危机当前,警钟为所有自动驾驶玩家而鸣。
如果此时此地,还不能用更具公约的方式,发展和推动自动驾驶安全和信任,等到更大危机到来,没有人能置身事外。
如果依然要在“辅助驾驶”、“自动驾驶”等行业话语上争论不休,如果让每一次“自动驾驶事故”成为舆论焦点,如果行业玩家都不得不“夸张宣传”才能不显得落后……
雪崩到来,没有一片雪花无辜。
一切是时候了。
(注:作者为量子位主编,专栏仅代表个人观点)
参考:
特斯拉事故统计:
https://www.tesladeaths.com/
Waymo自动驾驶报告:平均21万公里一次事故,严重事故都是人类司机的锅
https://storage.googleapis.com/sdc-prod/v1/safety-report/Waymo-Public-Road-Safety-Performance-Data.pdf
WHO道路交通死亡人数报告
https://news.un.org/zh/story/2018/12/1024371