【STM32】标准库与HAL库对照学习教程八--串口通信详解
- 一、前言
- 二、准备工作
- 三、通信的基本概念
- 1、通信方式
- 2、串行通信与并行通信
- (1)串行通信
- (2)并行通信
- 3、异步通信与同步通信
- (1)异步通信
- (2)同步通信
- 4、单工、半双工与全双工通信
- (1)单工通信
- (2)半双工通信
- (3)全双工通信
- 5、通信速率
- 四、STM32F1的USART介绍
- 1、串口通信简介
- 2、USART简介
- 3、USART结构框图
- 4、USART寄存器重点控制位
- (1)TXE
- (2)TC
- (3)RXNE
- 5、STM32与PC主机通信的方法
- 五、USB转串口模块
- 六、标准库使用串口中断通信
- 一、配置步骤
- 二、配置工程
- 三、相关程序
- 四、实验效果
- 七、HAL库使用串口中断通信
- 一、cubemx配置工程
- 二、常用函数讲解
- 三、主函数程序
- 四、实验效果
- 八、关于printf重定向
- 九、RS232补充说明(选看)
- 1、接口标准
- 2、逻辑电平规定
一、前言
| 本篇文章是对单片机串口通信的详讲,串口通信作为STM32单片机的一个重要功能,在程序调试中发挥着重要的作用,本篇从通信基本原理讲解开始,一步一步让您理解并会使用STM32的串口通信,实验程序包括标准库与HAL库,例程为串口中断通信实验,您也可以点击目录跳转到自己想看的内容。 |
二、准备工作
- STM32F103开发板(我用的是普中的STM32F103ZE开发板)
- cubemx软件、keil 5(MDK)
- USB转串口模块(CH340)
三、通信的基本概念
1、通信方式
通信的方式可以分为多种:
- 按照数据传送方式可分为串行通信和并行通信。
- 按照通信的数据同步方式,可分为异同通信和同步通信。
- 按照数据的传输方向又可分为单工、半双工和全双工通信。
下面我们就来简单介绍这几种通信方式。
2、串行通信与并行通信
(1)串行通信
串行通信是指使用一条数据线,将数据一位一位地依次传输,每一位数据占据一个固定的时间长度。
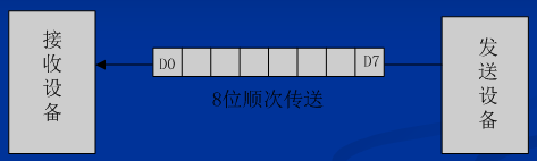
- 优点:传输线少,长距离传送时成本低。
- 缺点:数据的传送控制比并行通信复杂且速度相对较慢。
(2)并行通信
并行通信通常是将数据字节的各位用多条数据线同时进行传送,通常是8位、16位、32位等数据一起传输。
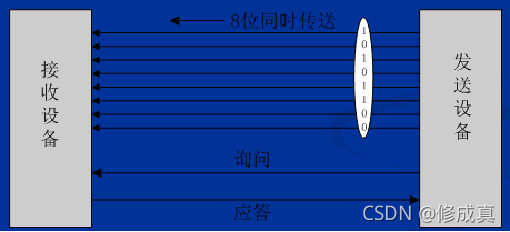
- 优点:控制简单、传输速度快。
- 缺点:长距离传送时成本高且接收方的各位同时接收存在困难,抗干扰能力差 。
3、异步通信与同步通信
(1)异步通信
异步通信是指通信的发送与接收设备使用各自的时钟控制数据的发送和接收过程。
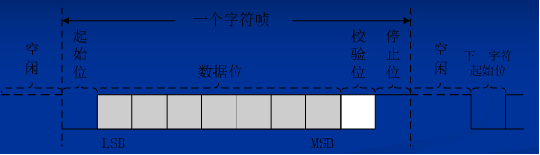
异步通信是以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的。
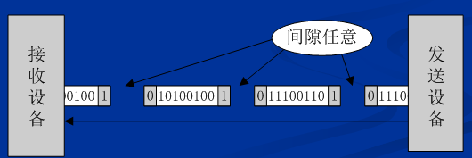
优点:不要求收发双方时钟的严格一致,实现容易。
缺点:每个字符要附加2~3位用于起止位,各帧之间还有间隔,因此传输效率不高 。
(2)同步通信
同步通信时要建立发送方时钟对接收方时钟的直接控制,使双方达到完全同步。实现方法有外同步和自同步两种。
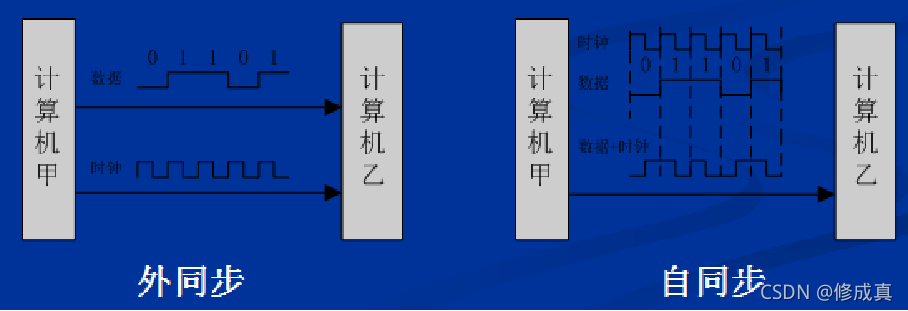
优点:由于传输因此传输效率高。
缺点:同步实现困难且开销大。
4、单工、半双工与全双工通信
(1)单工通信
单工是指数据传输仅能沿一个方向,就是一个设备只管发送,一个设备只管接收。
(2)半双工通信
半双工是指数据传输可以沿两个方向,但需要分时进行。也就是发送的时候不能接收,接收的时候不能发送。
(3)全双工通信
全双工是指数据可以同时进行双向传输。也就是发送的时候可以接收,接收的时候可以发送。

5、通信速率
衡量通信性能的一个非常重要的参数就是通信速率,通常以比特率(Bitrate)来表示。
比特率是每秒钟传输二进制代码的位数,单位是:位/秒(bps)。
例如:每秒钟传送200个字符,而每个字符格式包含10位(1个起始位、1个停止位、8个数据位),这时的比特率为:10位×200个/秒 = 2000 bps
四、STM32F1的USART介绍
1、串口通信简介
串口通信(Serial Communication),是指外设和计算机之间,通过数据信号线、地线等,按位进行传输数据的一种通信方式,属于串行通信方式。
串口是一种接口标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2、USART简介
USART即通用同步异步收发器,它能够灵活地与外部设备进行全双工数据交换。UART即通用异步收发器,它是在USART基础上裁剪掉了同步通信功能。STM32F103ZET6芯片含有3个USART,2个UART外设。
3、USART结构框图
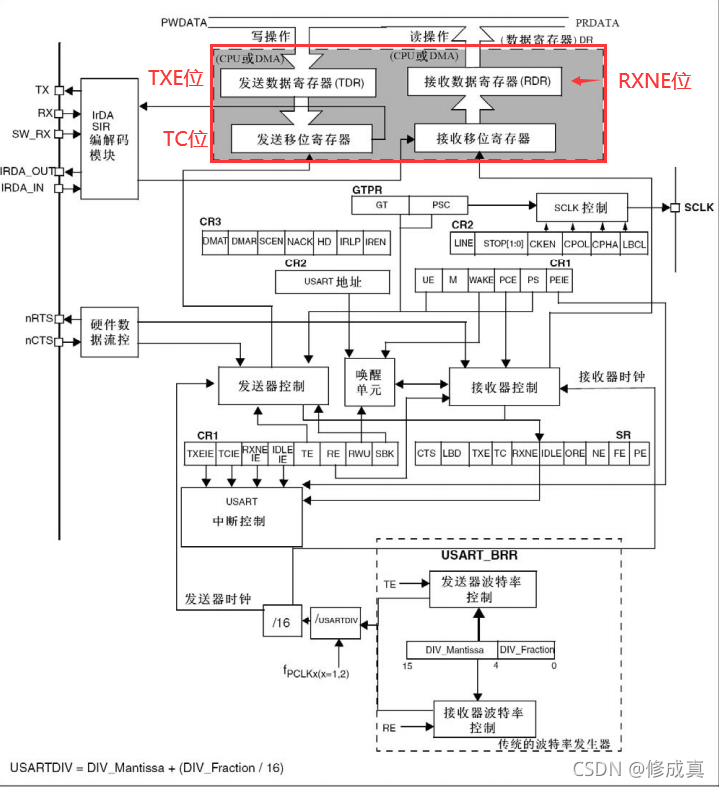
图片在STM32F1xx中文参考手册 通用同步异步收发器章节
结构图重点在框住的部分,通过寄存器USART_SR的TXE、TC、RXNE位知道串口收发情况。
4、USART寄存器重点控制位
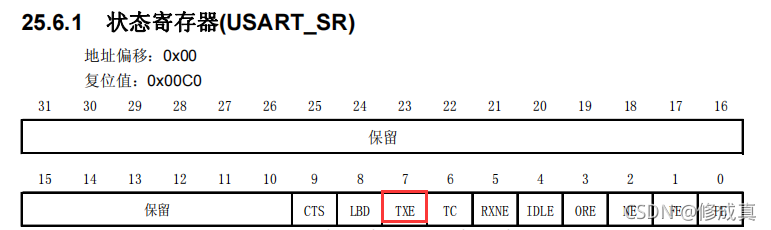
(1)TXE
TXE位是USART_SR寄存器的第七位,为1时,TDR寄存器中的数据已经被转移到移位寄存器,为0时,TDR寄存器中的数据还没有被转移到移位寄存器。复位时为1,TDR寄存器中有数据时,该位立即为0。

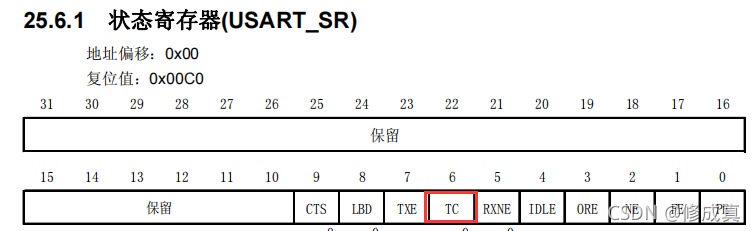
(2)TC
TC位是USART_SR寄存器的第六位,为1时,移位寄存器中的数据发送完成,为0时,移位寄存器中还有数据。复位时为1,需要手动清0,或者进行读操作让其为0。

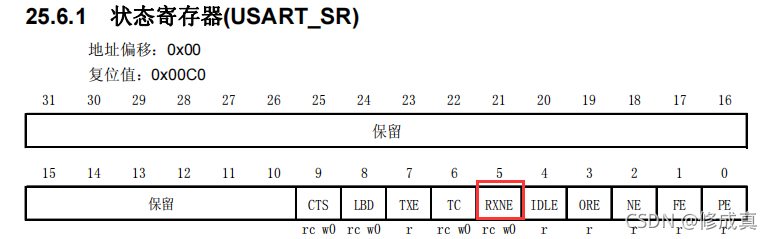
(3)RXNE
当接收完数据时,该位为1,其他时候为0。

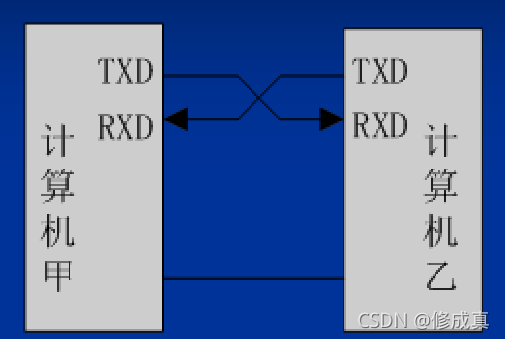
5、STM32与PC主机通信的方法
串口数据收发线要交叉连接,计算机的TXD要对应单片机的RXD,计算机的RXD要对应单片机的TXD,并且共GND。
如下图:
五、USB转串口模块
单片机与电脑进行通信需要用到USB转串口模块,因为电脑上没有RXD、TXD引脚,并且电脑还要安装CH340的驱动。
市场常见的USB转串口模块:

接上电脑,TX接单片机的RX,RX接单片机的TX,电源与地接到单片机上就可以串口通信了。
电脑上的CH340驱动我放在网盘上了,有需要自己去下载。
https://pan.baidu.com/s/1bO7mpkwjkB19HXvmD0083Q
密码:kpa6
六、标准库使用串口中断通信
一、配置步骤
(1)使能串口时钟及GPIO端口时钟
(2)GPIO端口模式设置,设置串口对应的引脚为复用功能
(3)初始化串口参数,包含波特率、字长、奇偶校验等参数
(4)使能串口
(5)设置串口中断类型并使能
(6)设置串口中断优先级,使能串口中断通道
(7)编写串口中断服务函数
二、配置工程
(1)复制上一章的工程,并重命名为8、串口中断通信。
(2)进入工程文件,进入APP文件,新建USART文件夹用来存放与串口相关的文件。

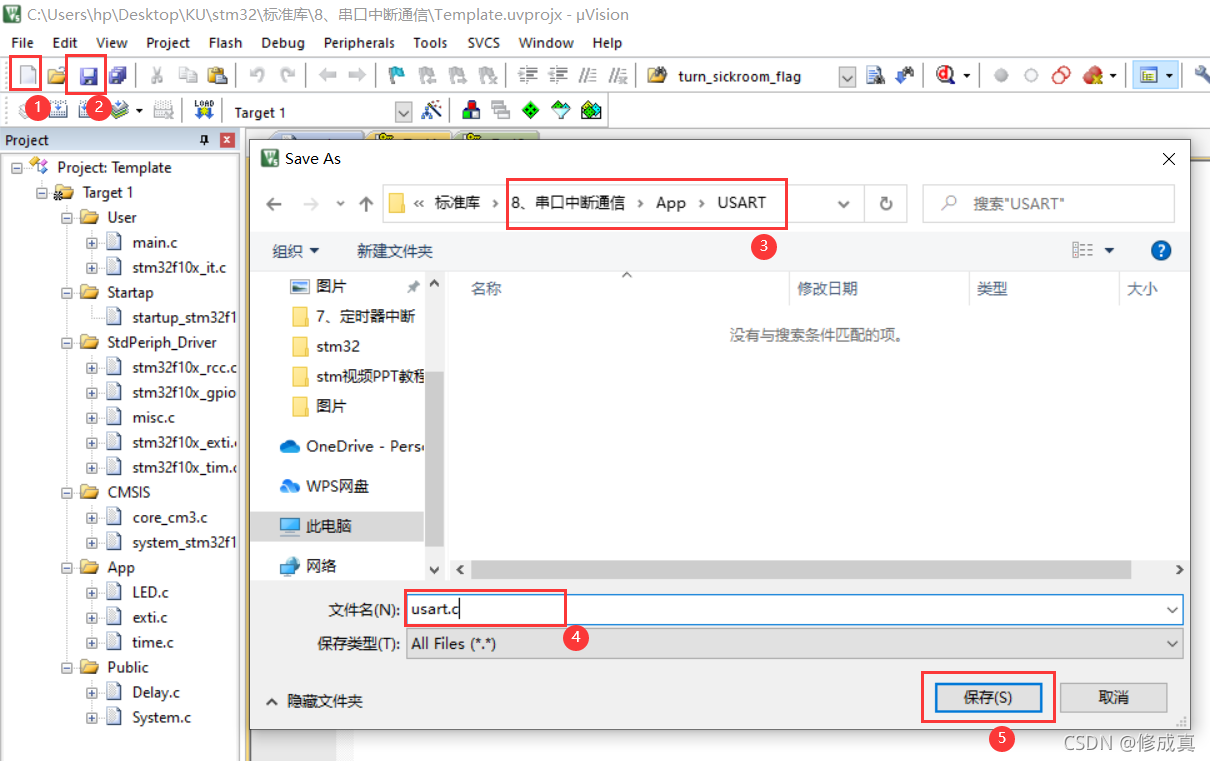
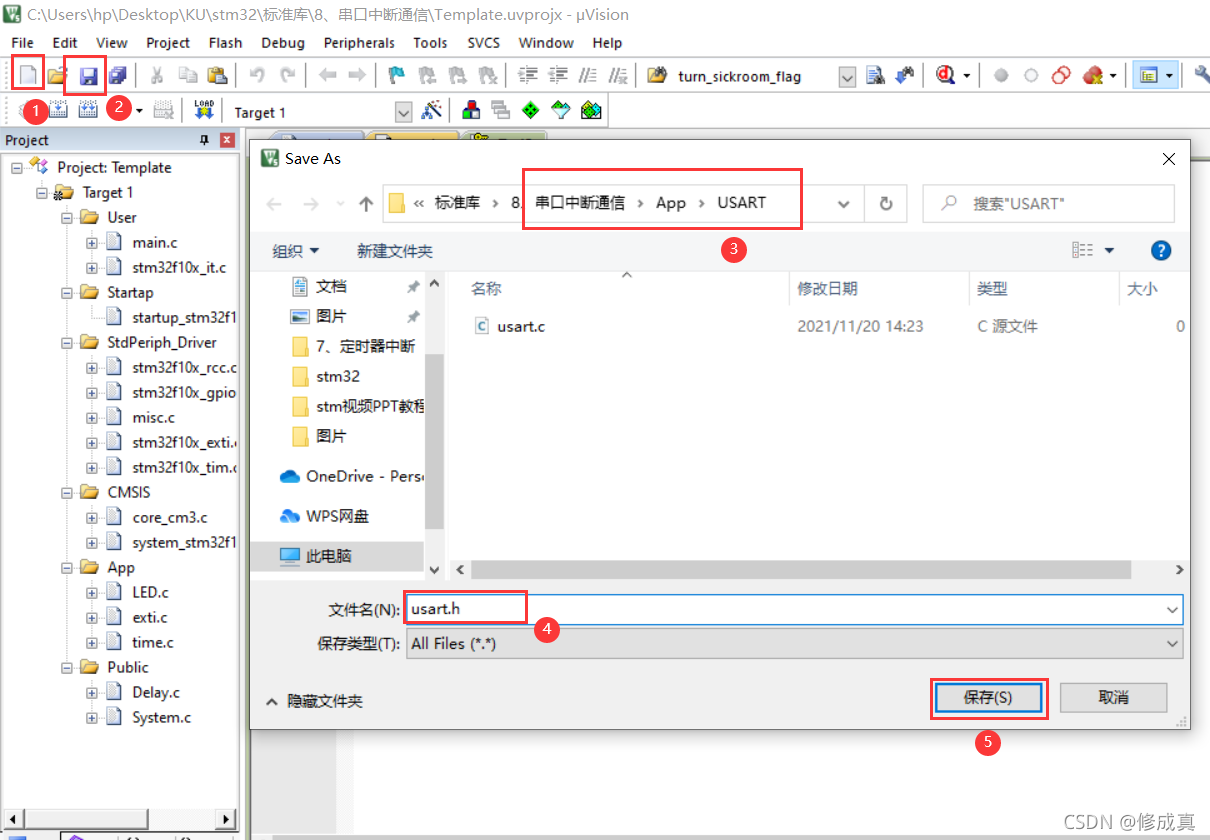
(3)打开工程,新建文件,并命名为usart.h与usart.c。
①
②
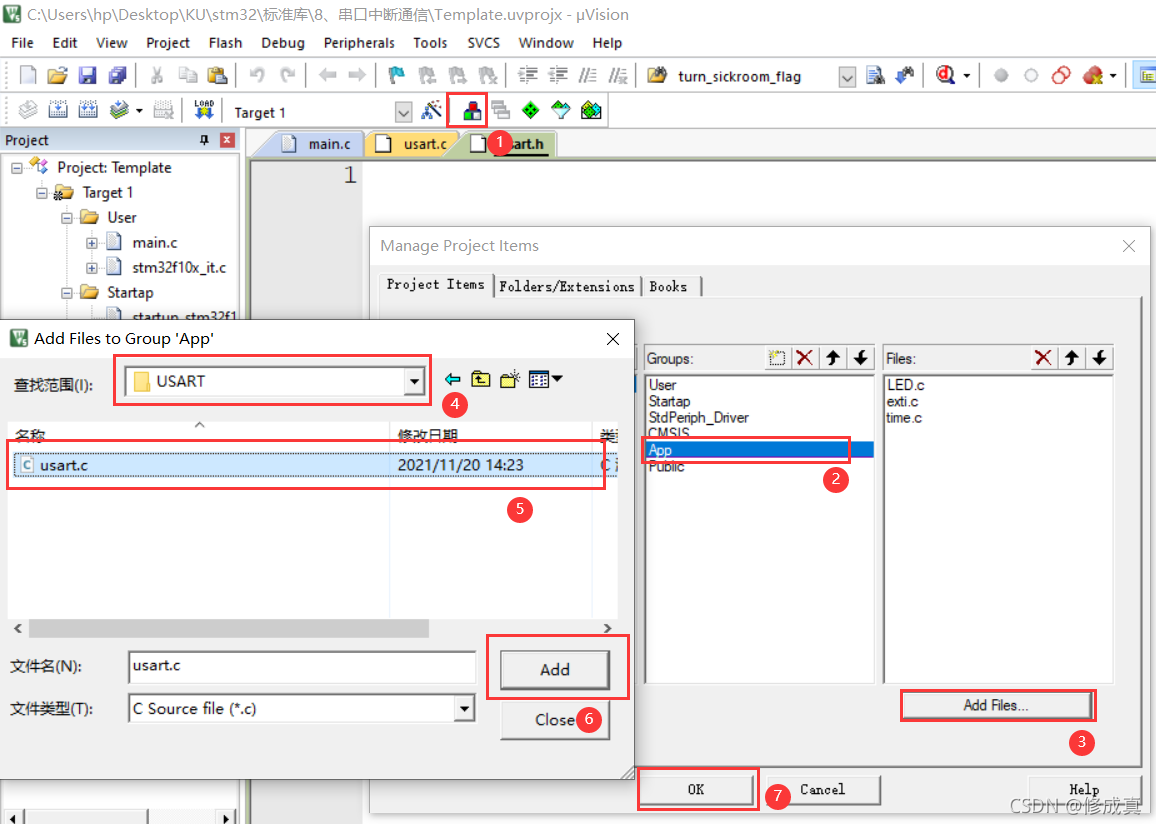
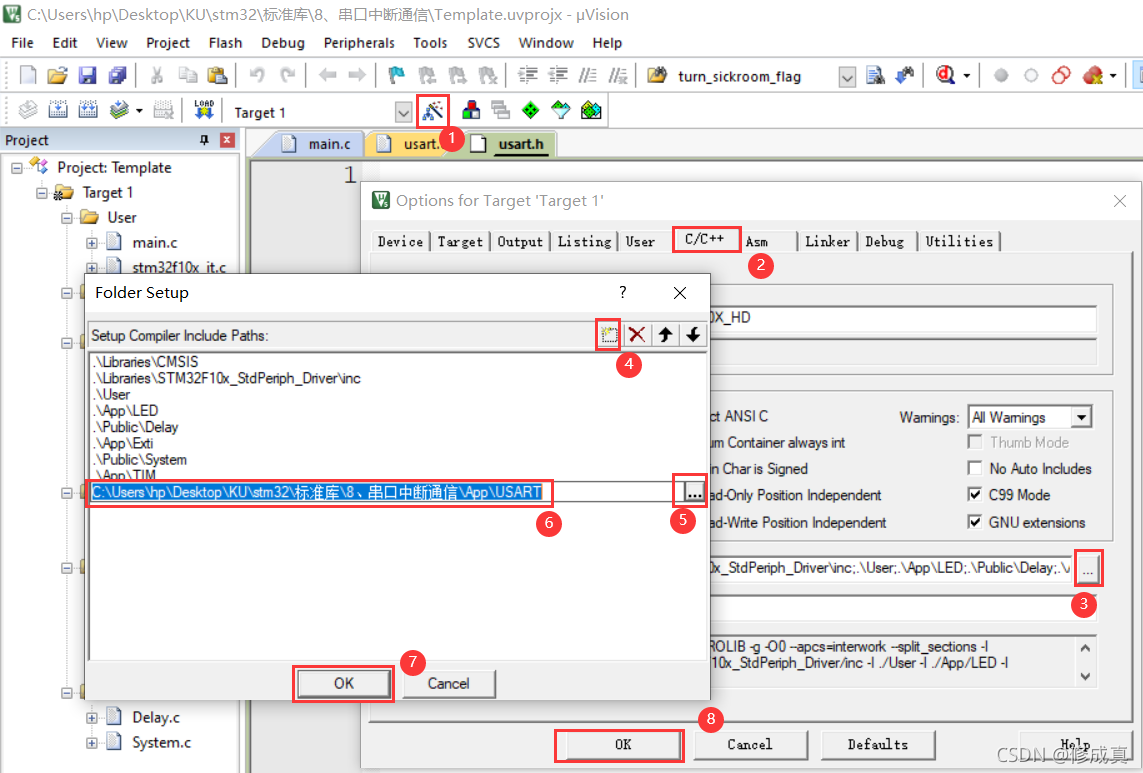
(4)添加文件到目录,并添加头文件路径。
①
②
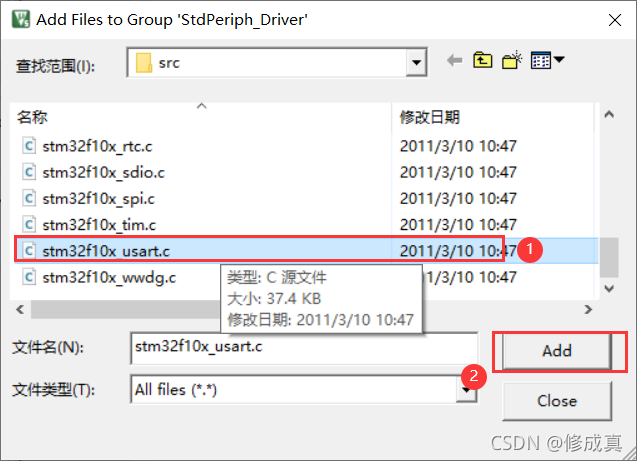
(5)要使用串口需要添加相应的文件。
①
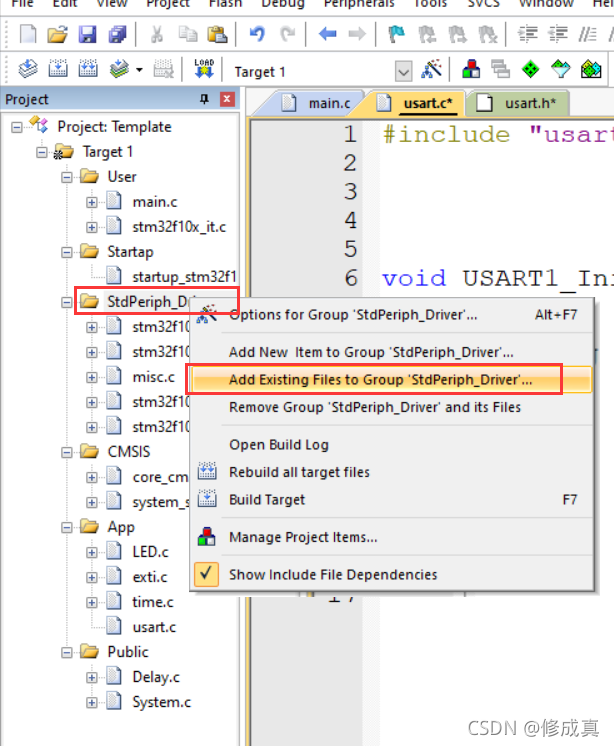
②
三、相关程序
mian.c
#include "LED.h"
#include "Delay.h"
#include "System.h"
#include "usart.h"
/*************************************************
*函数名: main
*函数功能: 主函数
*输入: 无
*返回值: 无
**************************************************/
int main()
{
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //抢占式优先级与响应式优先级的分组
LED_Init();
USART1_Init(9600);
while(1)
{
}
}
usart.h
#ifndef USART_H_
#define USART_H_
#include "stm32f10x.h"
/************串口引脚************/
#define USART1_GPIO_Port GPIOA
#define USART1_RX_Pin GPIO_Pin_10
#define USART1_TX_Pin GPIO_Pin_9
/************串口函数************/
void USART1_Init(u32 bound); //串口初始化
void USART_SendBit(USART_TypeDef* USARTx,u16 Data); //发送单个数据
uint16_t USART_ReceiveBit(USART_TypeDef* USARTx); //接收单个数据
void USART_SendString(USART_TypeDef* USARTx,char *string); //发送字符串
#endif
usart.c
#include "usart.h"
/*************************************************
*函数名: USART1_Init
*函数功能: 串口1的初始化
*输入: bound:波特率
*返回值: 无
**************************************************/
void USART1_Init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1, ENABLE); //时钟使能
GPIO_InitStruct.GPIO_Pin = USART1_TX_Pin; //发送引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //发送速度
GPIO_Init(USART1_GPIO_Port, &GPIO_InitStruct); //引脚初始化
GPIO_InitStruct.GPIO_Pin = USART1_RX_Pin; //接收引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(USART1_GPIO_Port, &GPIO_InitStruct); //引脚初始化
USART_InitStruct.USART_BaudRate = bound; //波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx; //收发模式
USART_InitStruct.USART_Parity = USART_Parity_No; //没有校验位
USART_InitStruct.USART_StopBits = USART_StopBits_1; //一位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b; //8位一个字节
USART_Init(USART1, &USART_InitStruct); //初始化串口
USART_Cmd(USART1, ENABLE); //串口使能
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //接收中断使能
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn; //要打开的中断通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; //抢占式优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; //相应式优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //NVIC通道使能
NVIC_Init(&NVIC_InitStruct);
USART_ClearFlag(USART1, USART_FLAG_TC); //TC位初始值位1,要先清0
}
//直接使用串口发送接收函数会出现内容覆盖的问题,所以需要我们重写函数
/*************************************************
*函数名: USART_SendBit
*函数功能: 串口发送函数
*输入: Data:发送的数据
*返回值: 无
**************************************************/
void USART_SendBit(USART_TypeDef* USARTx,u16 Data)
{
USART_SendData(USARTx, Data);
//while(!USART_GetFlagStatus(USARTx, USART_FLAG_TXE)); //要等待数据全部转到移位寄存器
//USART_ClearFlag(USARTx, USART_FLAG_TXE); //清空标志位
while(!USART_GetFlagStatus(USARTx, USART_FLAG_TC));//要等待数据全部发出
USART_ClearFlag(USARTx, USART_FLAG_TC); //清空标志位
}
/*************************************************
*函数名: USART_ReceiveBit
*函数功能: 串口接收函数
*输入: USARTx:串口
*返回值: 接收到的数据
**************************************************/
uint16_t USART_ReceiveBit(USART_TypeDef* USARTx)
{
while(!USART_GetFlagStatus(USARTx, USART_FLAG_RXNE)); //等待接收的数据全部接收
USART_ClearFlag(USARTx, USART_FLAG_RXNE);
return USART_ReceiveData(USARTx);
}
/*************************************************
*函数名: USART_SendString
*函数功能: 串口发送字符串函数
*输入: USARTx:串口,string:字符型指针
*返回值: 无
**************************************************/
void USART_SendString(USART_TypeDef* USARTx,char *string)
{
while(*string)
{
USART_SendBit(USARTx,*string++);
}
}
/*************************************************
*函数名: USART1_IRQHandler
*函数功能: 串口中断函数-将从电脑发送的数据发回给电脑
*输入: 无
*返回值: 无
**************************************************/
void USART1_IRQHandler()
{
u16 r;
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断中断标志
{
r = USART_ReceiveData(USART1);
USART_SendBit(USART1,r);
}
}
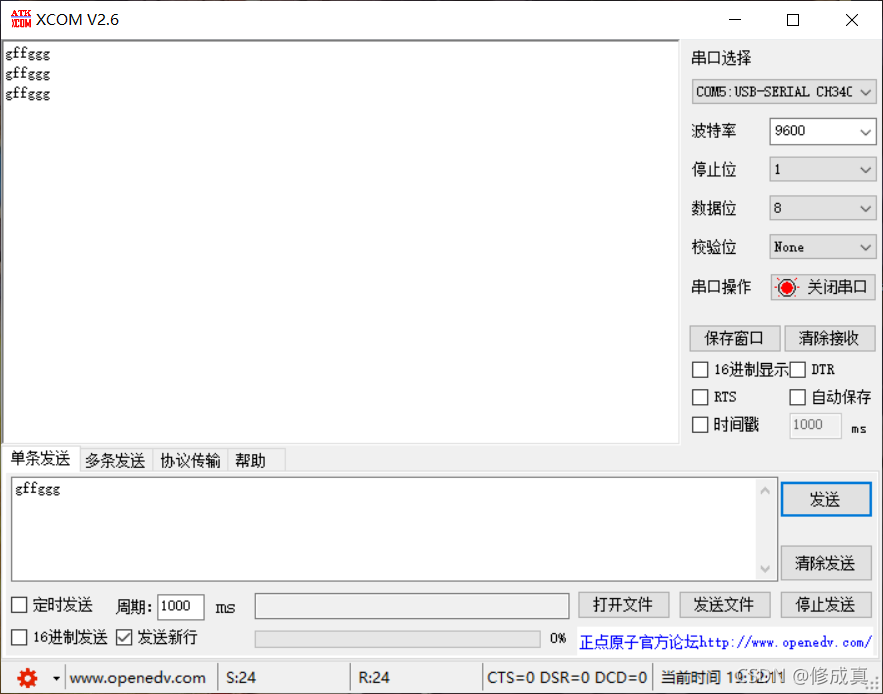
四、实验效果
七、HAL库使用串口中断通信
一、cubemx配置工程
(1) 打开cubemx,新建工程,选择自己的芯片。

(2) 配置RCC,选择外部高速时钟。
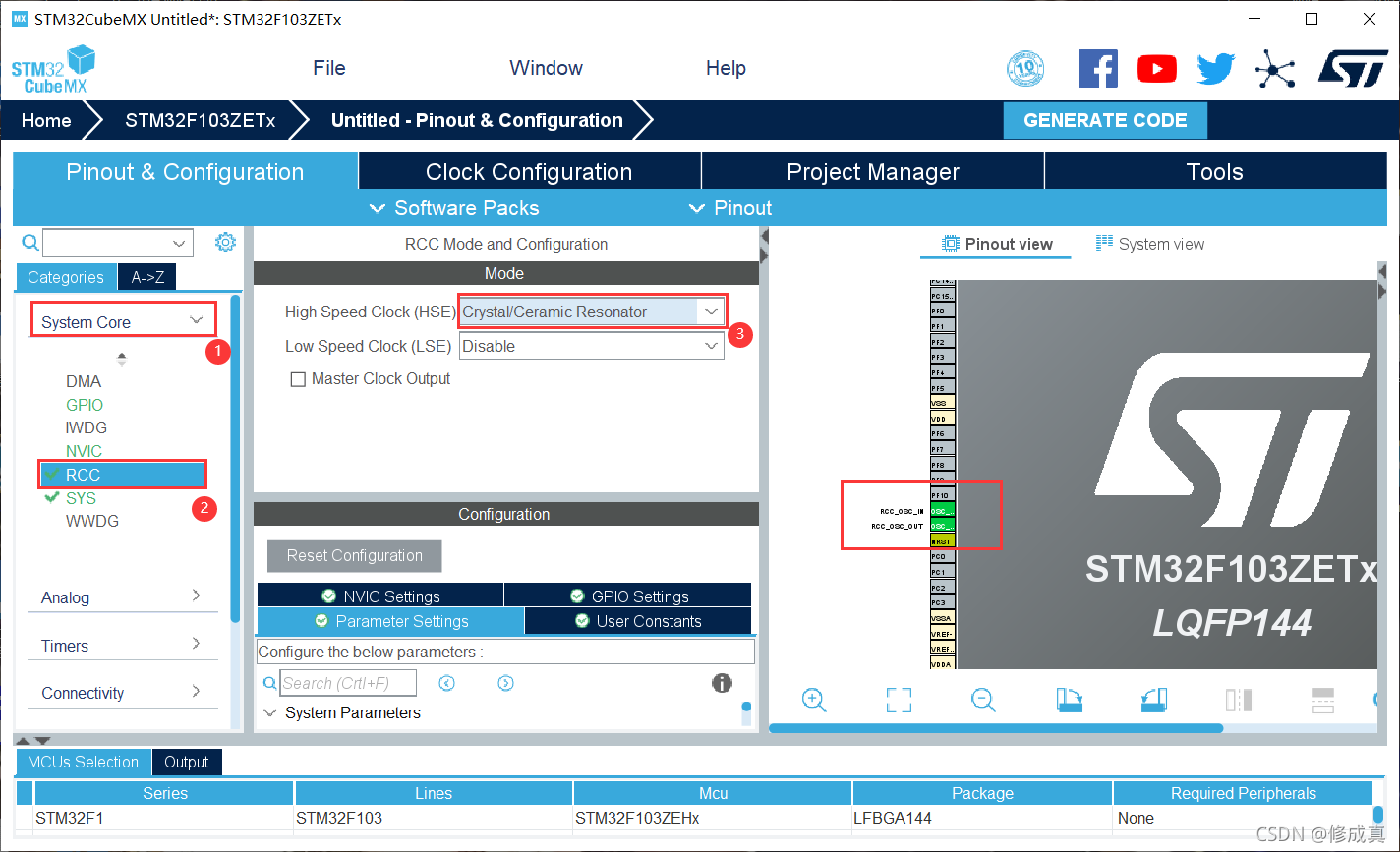
(3) 配置时钟树。

(4) 配置串口
①
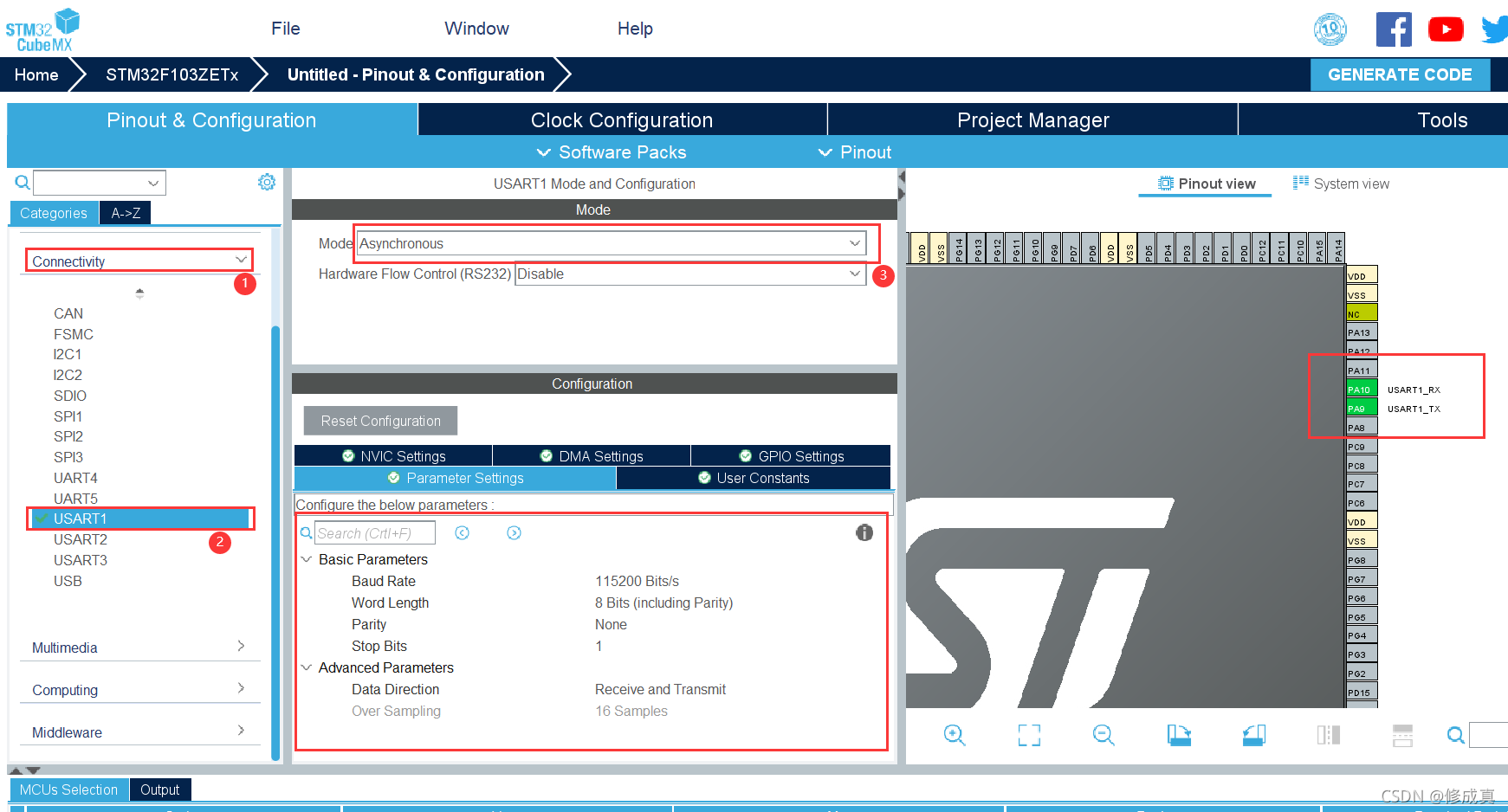
- Mode:设置为异步通信(Asynchronous)
- 基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1 接收和发送都使能 (默认的就行)
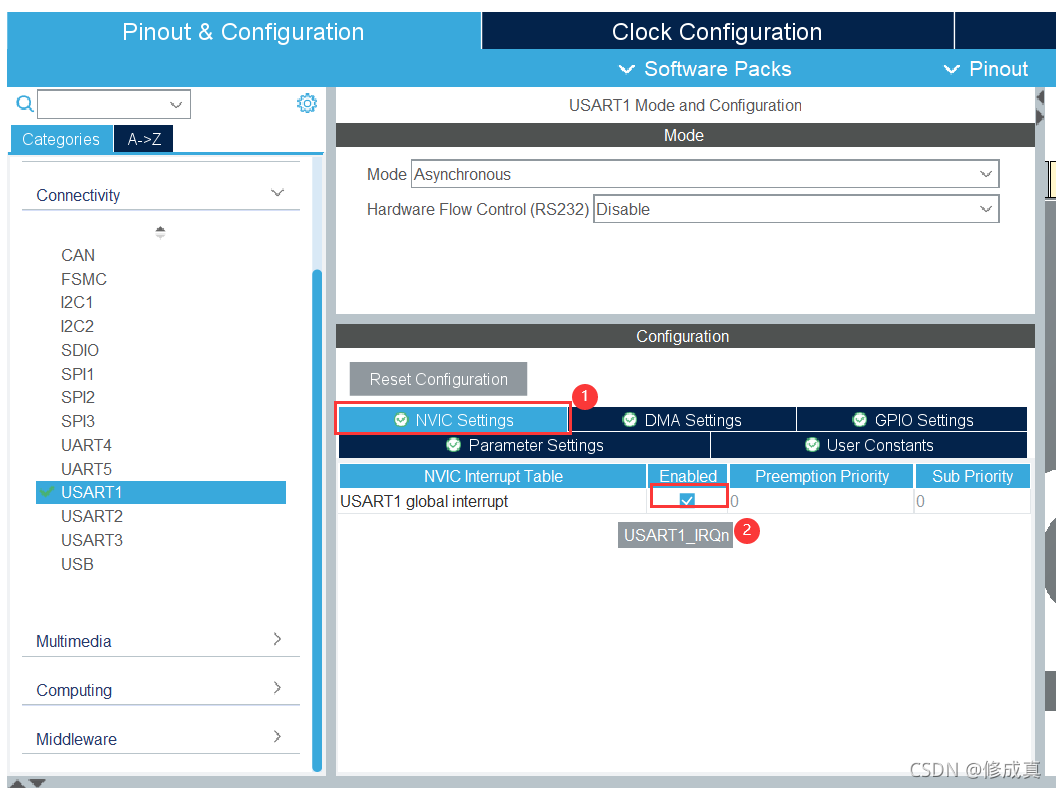
②打开串口中断
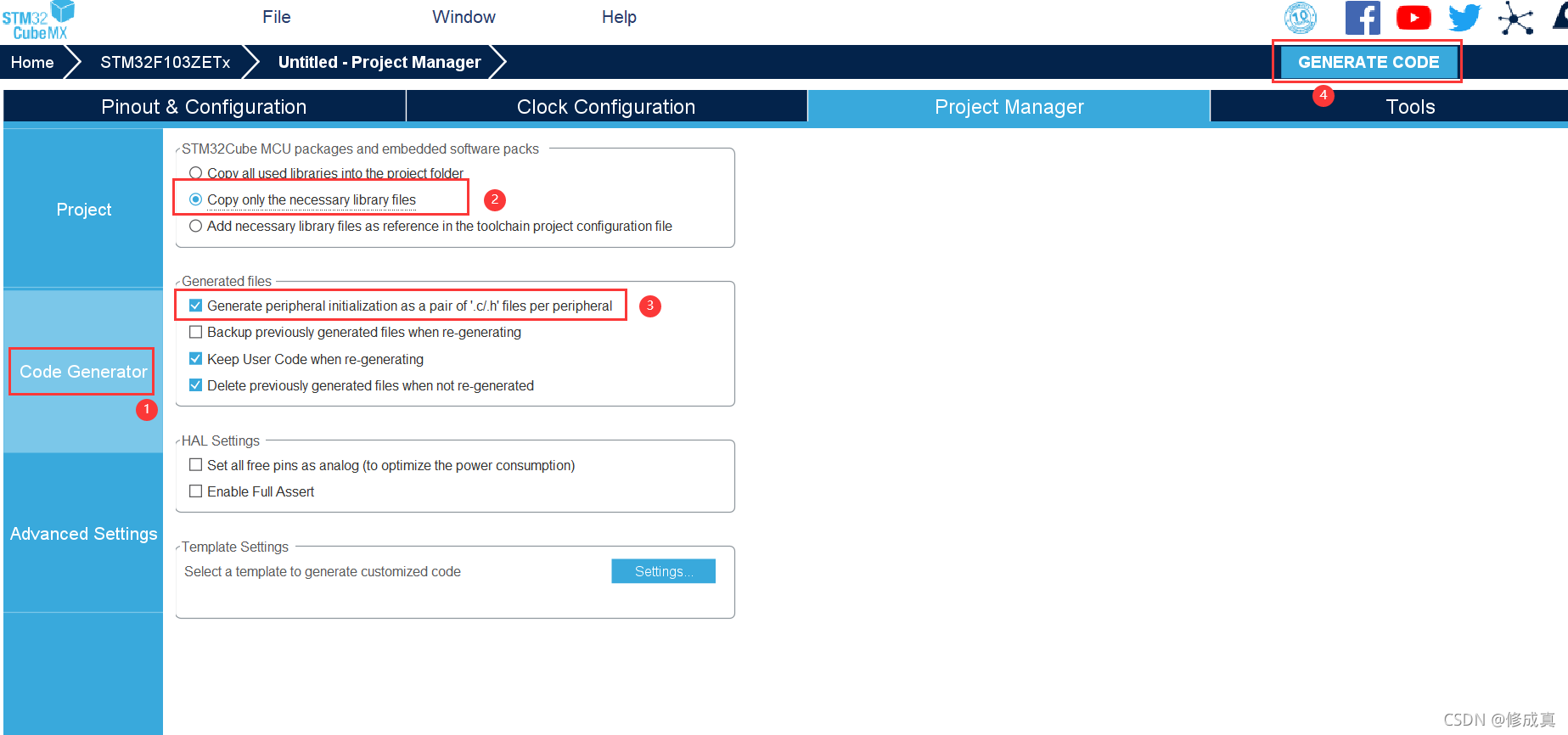
(5) 工程文件配置并生成工程
①
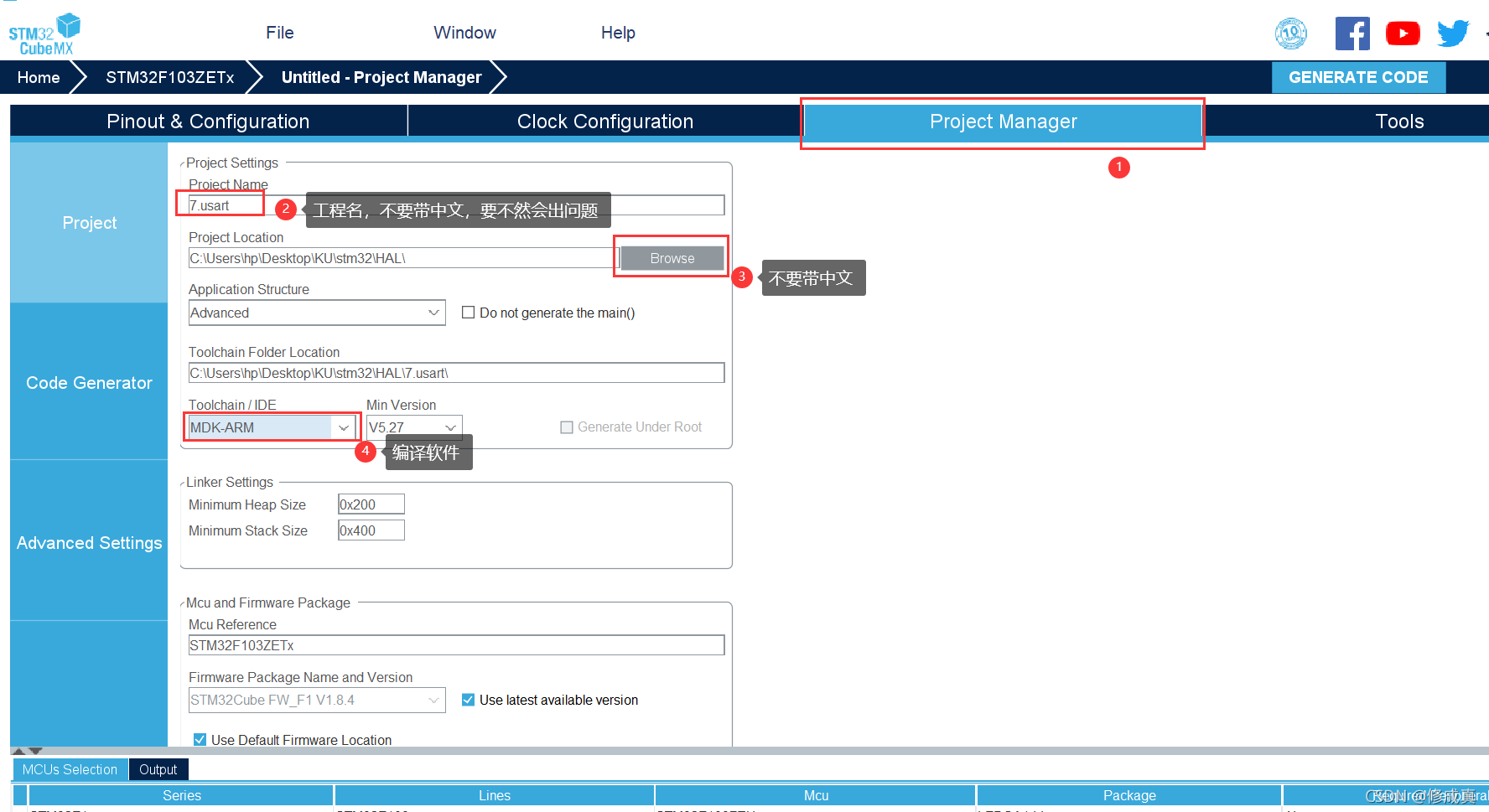
②
二、常用函数讲解
- HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送(只触发一次中断)
- HAL_UART_Receive_IT();串口中断模式接收(只触发一次中断)
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收
- HAL_UART_GetState();判断接收与发送是否结束
相关参数:
- UART_HandleTypeDef *huart 串口的别名 如 : 我们使用串口USART1的别名就是huart1。
- *pData 需要发送的数据
- Size 发送的字节数
- Timeout 最大发送时间
- HAL_UART_STATE_BUSY_RX,接收完成标志
- HAL_UART_STATE_BUSY_TX,发送完成标志
回调函数:
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);//接收中断回调函数
- HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //发送中断回调函数
- void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //串口发送一半中断回调函数
- void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);//串口接收一半回调函数
串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改。
三、主函数程序
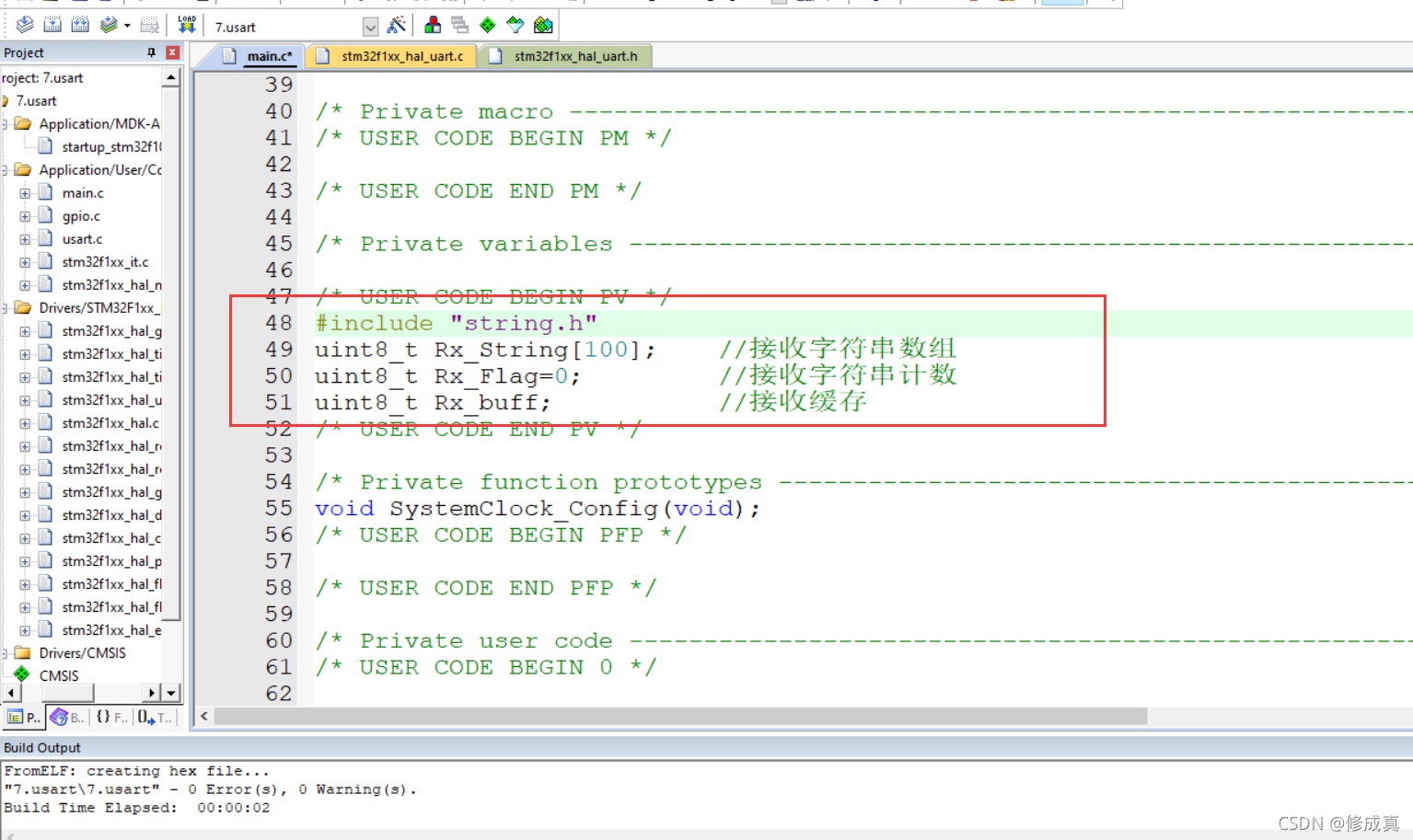
#include "string.h"
uint8_t Rx_String[100]; //接收字符串数组
uint8_t Rx_Flag=0; //接收字符串计数
uint8_t Rx_buff; //接收缓存
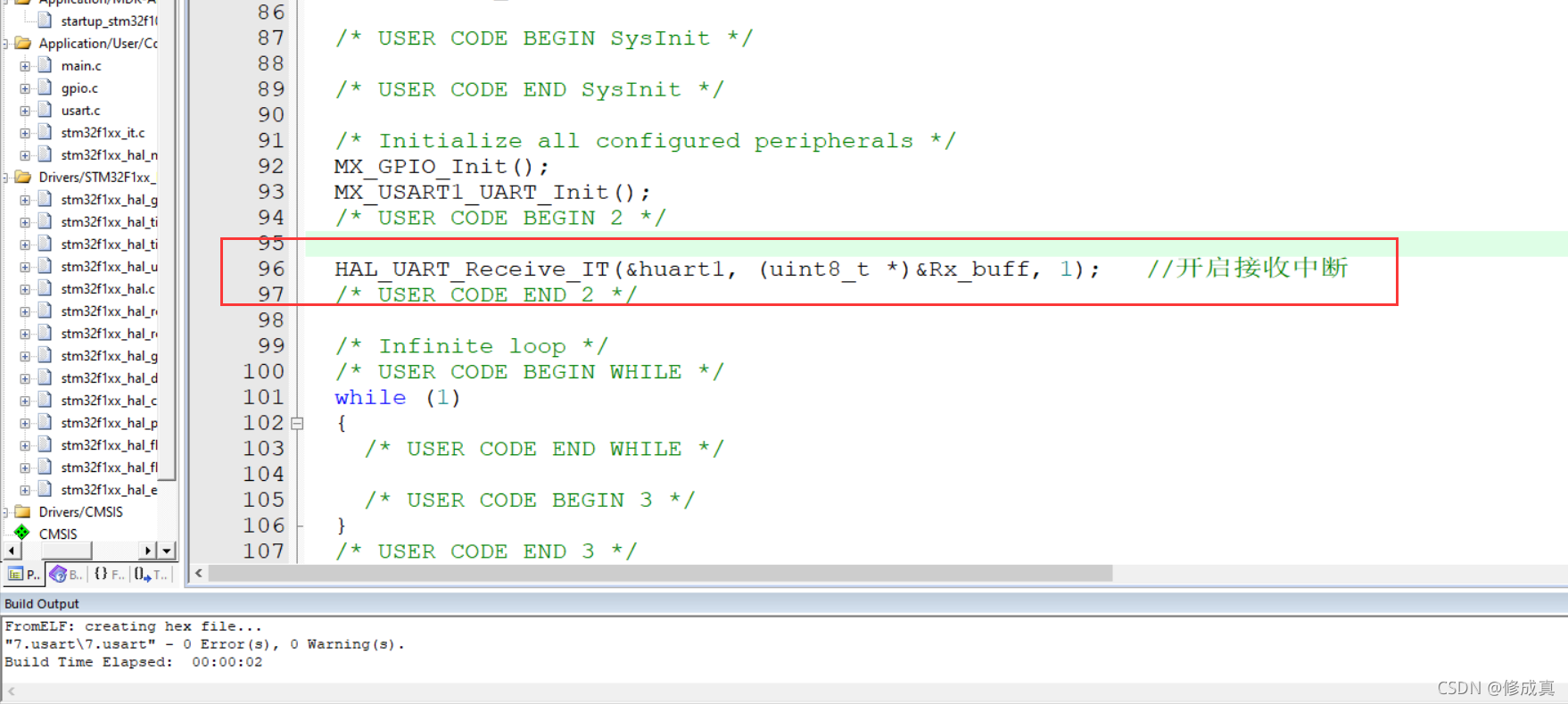
HAL_UART_Receive_IT(&huart1, (uint8_t *)&Rx_buff, 1); //开启接收中断

void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
Rx_String[Rx_Flag++] = Rx_buff; //接收字符
if(Rx_String[Rx_Flag-1] == 0x0A) //判断是否接收结束
{
HAL_UART_Transmit(&huart1, (uint8_t *)&Rx_String, Rx_Flag,0xFFFF); //字符串发送
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX); //判断发送是否完毕
memset(Rx_String,0x00,sizeof(Rx_buff)); //清空接收字符串
Rx_Flag = 0; //清空计数器
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&Rx_buff, 1); //再开启接收中断
}
}
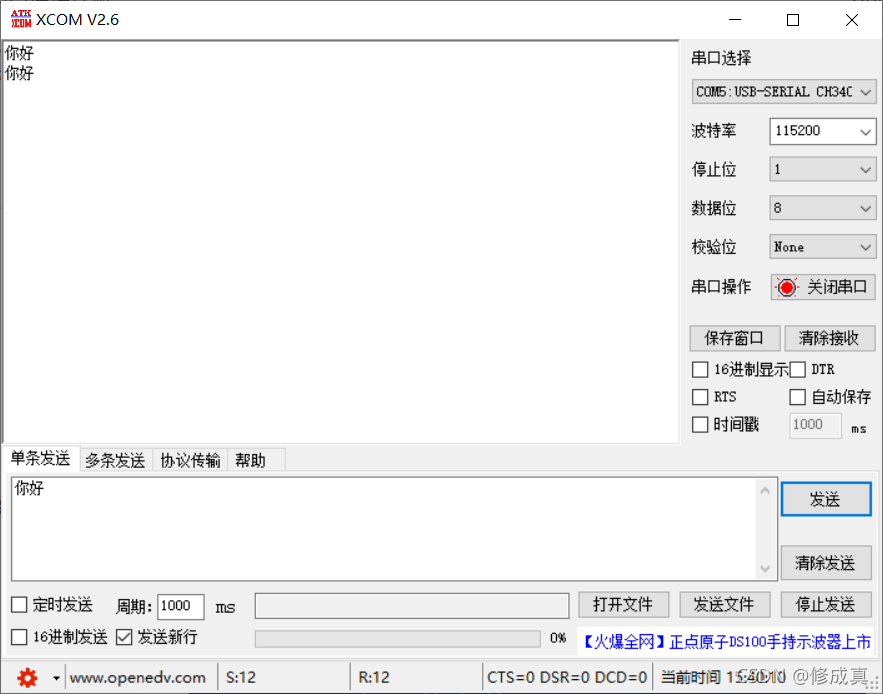
四、实验效果
八、关于printf重定向
C语言中printf函数默认输出设备是显示器,如果要实现在
串口或者LCD上显示,必须重定义标准库函数里调用的与输出设备相关的函数。比如使用printf输出到串口,需要将fputc里面的输出指向串口。
这一过程就叫重定向。
对于标准库
将这段程序加入主函数中
int fputc(int ch,FILE *p) //函数默认的,在使用printf函数时自动调用
{
USART_SendData(USART1,(u8)ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
int fgetc(FILE *p)
{
uint8_t ch = 0;
USART_SendData(USART1, ch);
return ch;
}
并添加stdio.h头文件,就可以使用C语言中的printf函数将字符串通过串口打印在电脑上了。
对于HAL库
将这段程序加入主函数中
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
并添加stdio.h头文件,就可以使用C语言中的printf函数将字符串通过串口打印在电脑上了。
九、RS232补充说明(选看)
1、接口标准
串口通信的接口标准有很多,有RS-232C、RS-232、RS-422A、RS-485等。常用的就是RS-232和RS-485。RS-232其实是RS-232C的改进,原理是一样的。这里我们就以RS-232C接口进行讲解。
RS-232C是EIA(美国电子工业协会)1969年修订RS-232C标准。RS-232C定义了数据终端设备(DTE)与数据通信设备(DCE)之间的物理接口标准。
RS-232C接口规定使用25针连接器,简称DB25,连接器的尺寸及每个插针的排列位置都有明确的定义 。
2、逻辑电平规定
RS-232C对逻辑电平也做了规定,如下:
- 在TXD和RXD数据线上,逻辑1为(-3)V到(-15)V的电压,逻辑0为3V到15V的电压。
- 在RTS、CTS、DSR、DTR和DCD等控制线上,信号有效(ON状态)为3V到15V的电压,信号无效(OFF状态)为(-3)V到(-15V)的电压。
由此可见,RS-232C是用正负电压来表示逻辑状态,与晶体管-晶体管逻辑集成电路(TTL)以高低电平表示逻辑状态的规定正好相反
到这里就结束啦!
