一.功能介绍
1.通过手机端网络调试助手,语音识别,对灯光,风扇,等电器进行远程控制。
2.通过火焰报警,震动报警,视频监控等功能保证家庭的安全。
3.实时将环境温湿度数据,各种安防信息发送到客户端进行显示。
4.通过红外遥控也能对部分家电进行远程控制。
5.通过翔云平台提供的人脸对比识别服务,实现人脸识别开锁功能。
二.实物展示
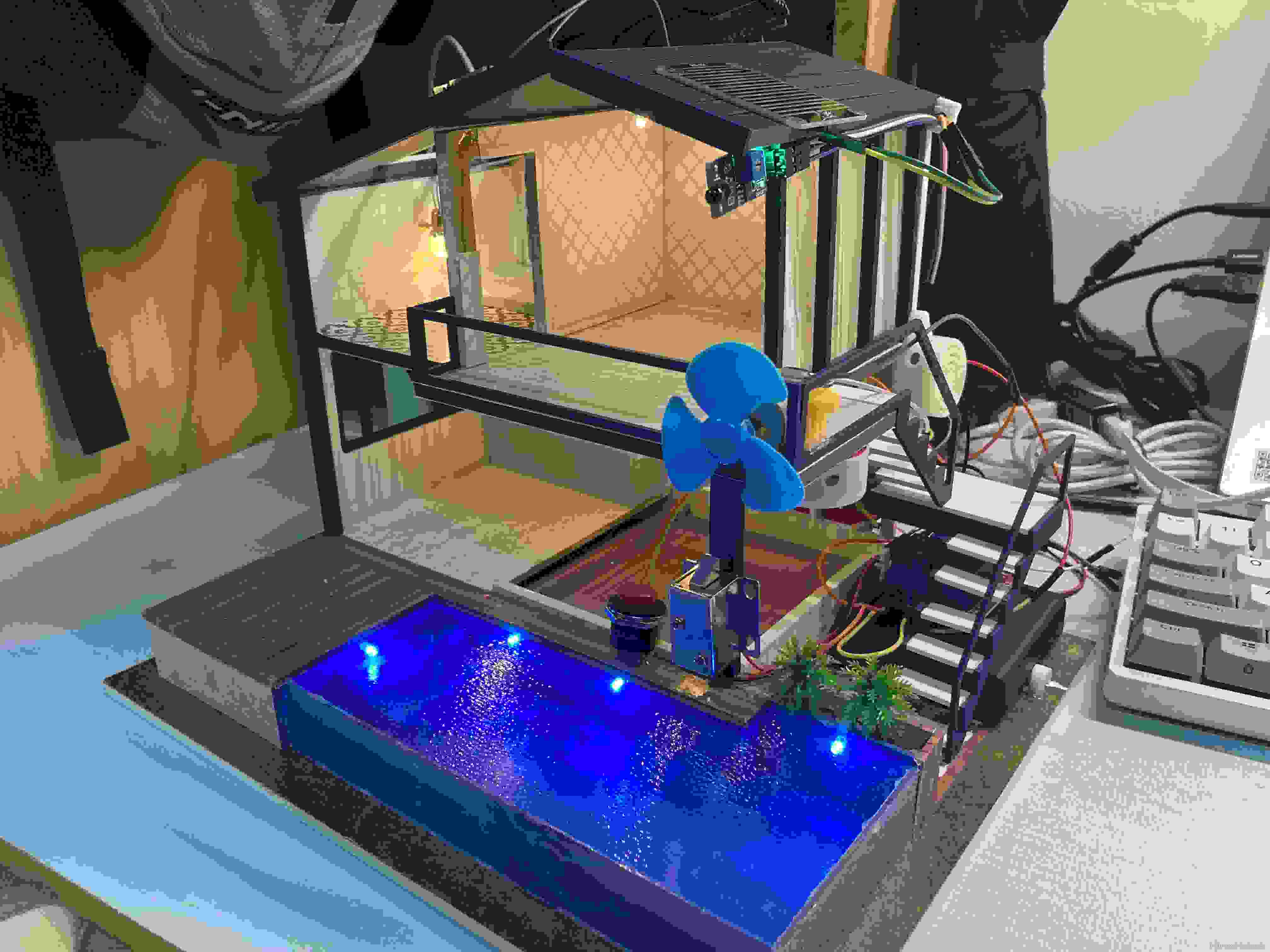
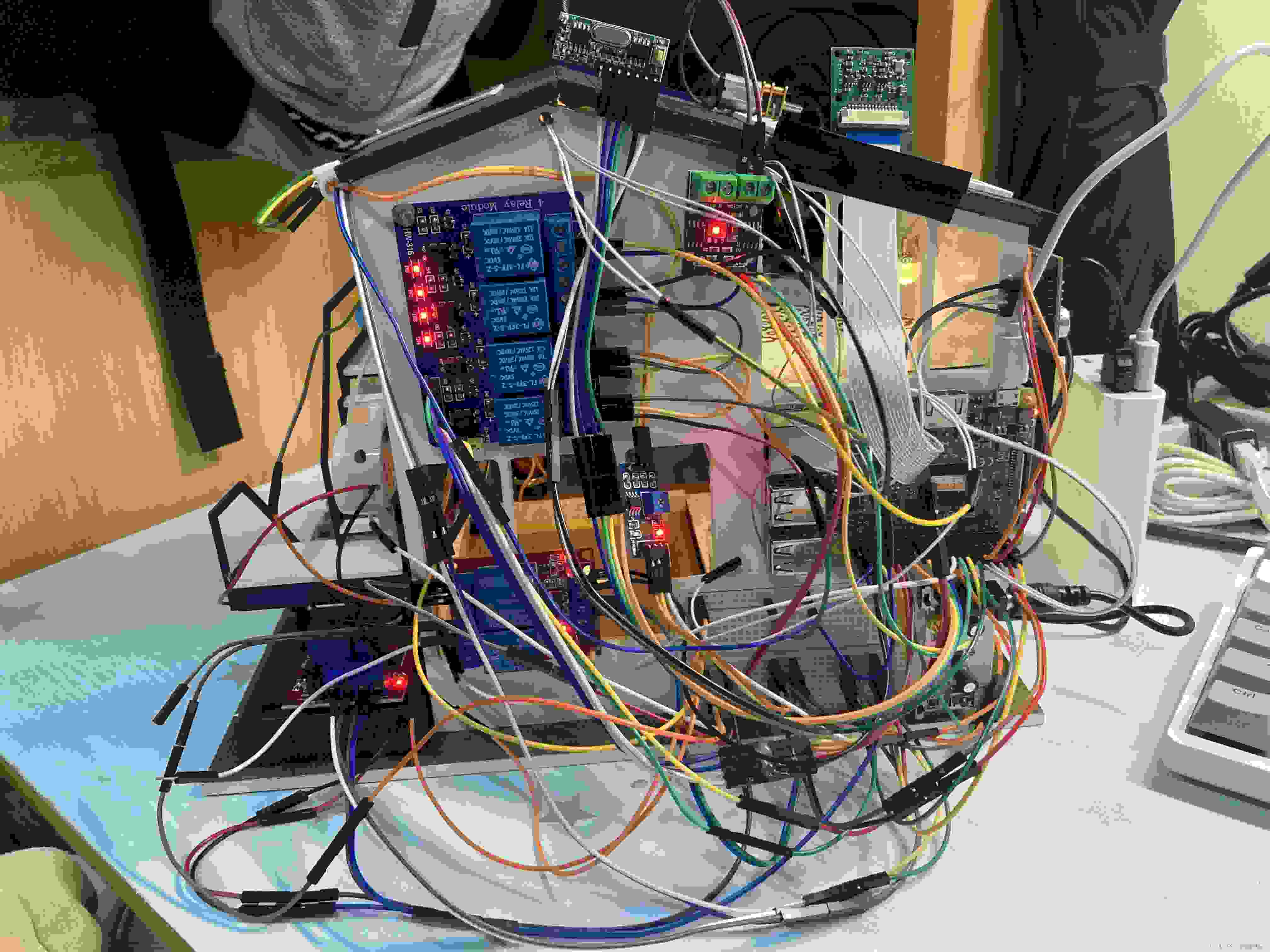
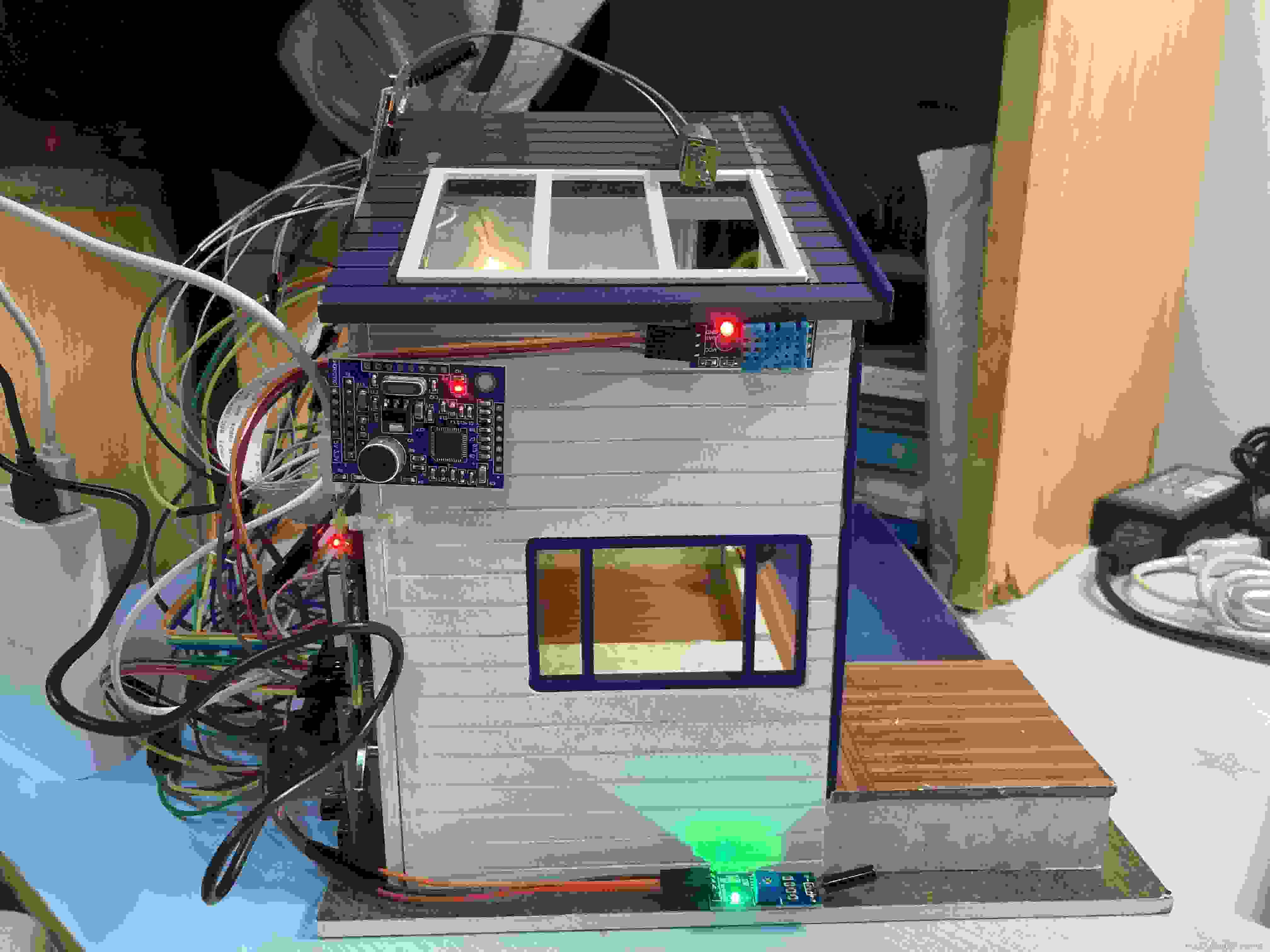
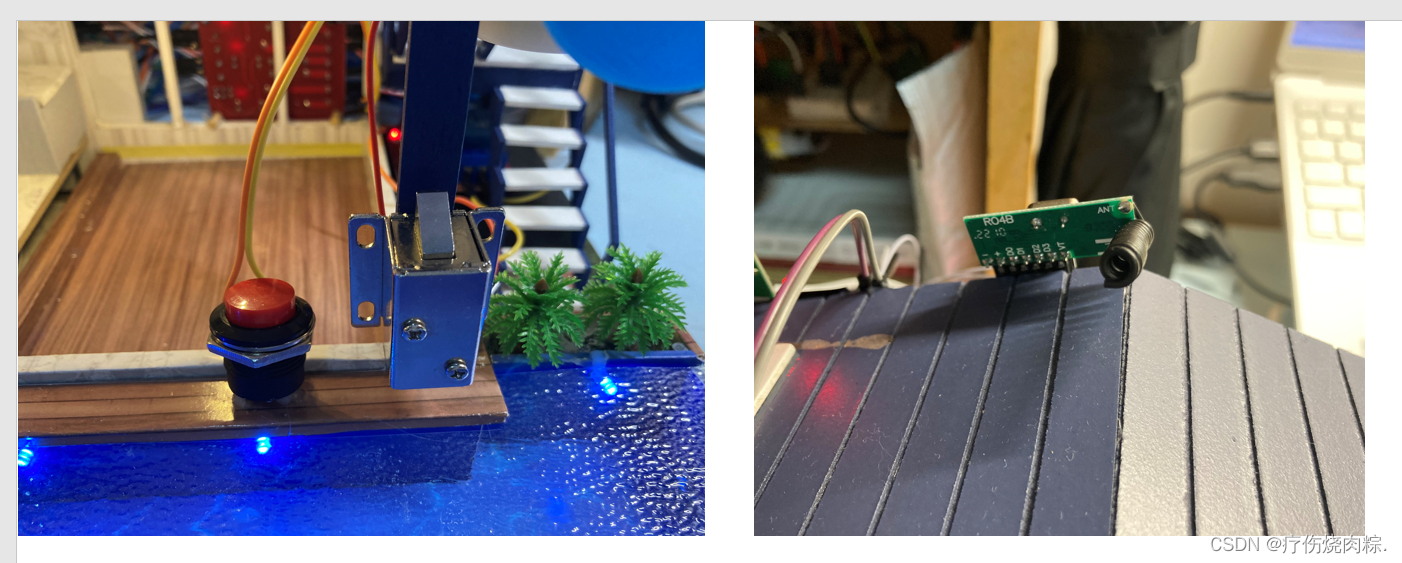
人脸识别按钮和门锁 433m红外接收模块

摄像头 火焰报警和雨滴传感器
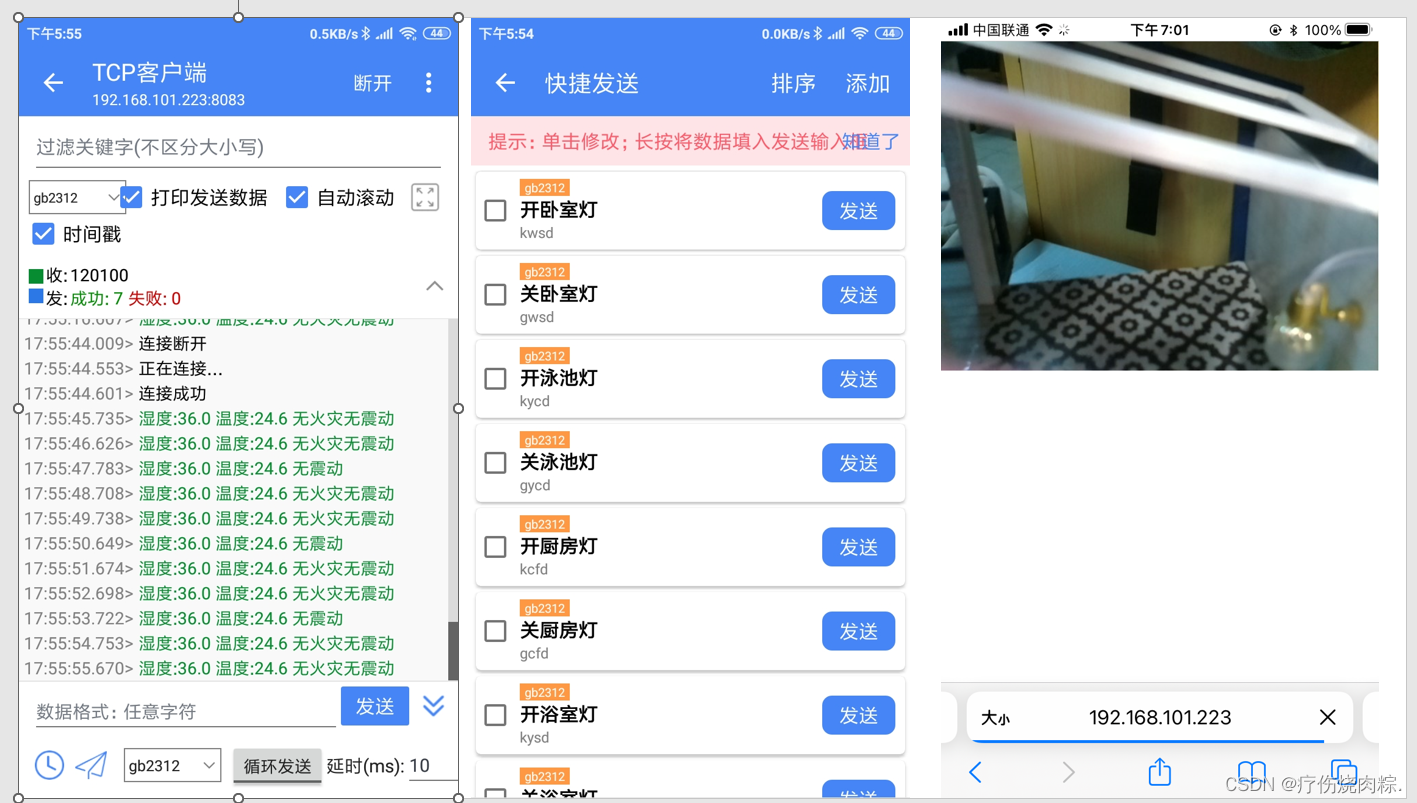
手机端实时显示环境状态 手机端通过指令控制家电 网页实时视频监控
三.程序
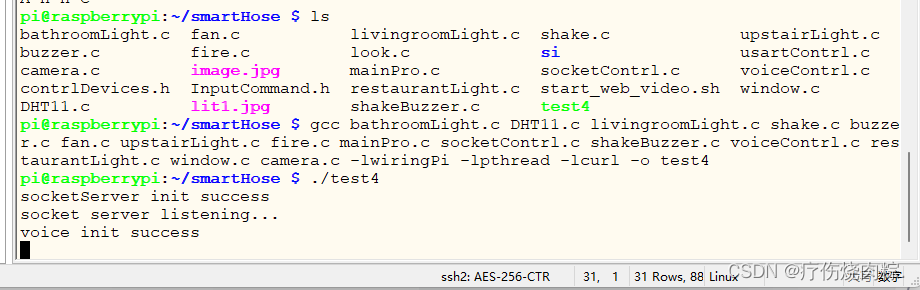
编译运行:
1.mainPro.c
#include<stdio.h>#include<string.h>#include<stdlib.h>#include<pthread.h>#include<unistd.h>#include <sys/types.h>#include <sys/socket.h>#include <arpa/inet.h>#include <netinet/in.h>#include <stdint.h>#include <curl/curl.h>#include"InputCommand.h"#include"contrlDevices.h"//为了线程里能调到链表头,要把这两个表头设置为全局变量struct Devices *pdeviceHead = NULL;struct InputCommander *pCommandHead = NULL;struct InputCommander *socketHandler = NULL;int c_fd;//定义互斥量(锁)pthread_mutex_t mutex;typedef unsigned char uint8;typedef unsigned int uint16;typedef unsigned long uint32; #define HIGH_TIME 32pthread_t writeThread;pthread_t voiceThread;pthread_t socketThread;pthread_t fireThread;pthread_t DHT11Thread;pthread_t readThread;pthread_t shakeThread;pthread_t windowThread;pthread_t keyThread;pthread_t cameraThread;pthread_t remoteThread;int tmp = 0;//设置火灾和振动的标志位int wintmp1 = 0;int wintmp2 = 0;#define key 6 //拍照按键char Message[4][100] = {"未启用!", "未启用!", "未启用!", "未启用!"};int write_flag = 0; //标记位,标记通知线程是否打开 1:打开 0:关闭int a = 0;int b = 0;extern uint32 databuf;struct Devices* findDeviceByName(char *name, struct Devices *phead){struct Devices *tmp = phead;if(phead == NULL){return NULL;}else{while(tmp != NULL){if(strcmp(tmp->deviceName, name) == 0){return tmp;}tmp = tmp->next;}return NULL;}}struct InputCommander* findCommandByName(char *name, struct InputCommander *phead){struct InputCommander *tmp = phead;if(phead == NULL){return NULL;}else{while(tmp != NULL){if(strcmp(tmp->commandName, name) == 0){return tmp;}tmp = tmp->next;}return NULL;}}void *window_thread(void *datas){struct Devices *windowDeviceTmp = NULL;windowDeviceTmp = findDeviceByName("window", pdeviceHead);if(windowDeviceTmp == NULL){printf("find window error\n");pthread_exit(NULL);}windowDeviceTmp->deviceInit(windowDeviceTmp->pinNum);while(1){if(digitalRead(5) == 0){//没雨 开窗 5引脚就是检测是否有雨水 sleep(1);b = 1;if(a != 0){windowDeviceTmp->open(windowDeviceTmp->pinNum);//正转 开窗sleep(5);windowDeviceTmp->deviceInit(windowDeviceTmp->pinNum);//停while(digitalRead(5) == 0);}}else if(digitalRead(5) == 1){sleep(1);a = 1;if(b != 0){windowDeviceTmp->close(windowDeviceTmp->pinNum);//反转 关窗sleep(5);windowDeviceTmp->deviceInit(windowDeviceTmp->pinNum);//停while(digitalRead(5) == 1);}}}}void *shake_thread(void *datas) //震动线程{int tmp1 = 0;struct Devices *shakeDeviceTmp = NULL;struct Devices *shakebuzzerDeviceTmp = NULL; shakeDeviceTmp = findDeviceByName("shake", pdeviceHead); //在设备工厂找到震动模块和震动蜂鸣器shakebuzzerDeviceTmp = findDeviceByName("shakebuzzer", pdeviceHead);if((shakeDeviceTmp == NULL)&&(shakebuzzerDeviceTmp == NULL)){printf("find shake or shakebuzzer error\n");pthread_exit(NULL);}shakeDeviceTmp->deviceInit(shakeDeviceTmp->pinNum); //震动初始化shakebuzzerDeviceTmp->deviceInit(shakebuzzerDeviceTmp->pinNum);//蜂鸣器初始化while(1){//tmp = 1;if(digitalRead(26) == 1) {shakebuzzerDeviceTmp->open(shakebuzzerDeviceTmp->pinNum);//开震动蜂鸣器delay(3);shakebuzzerDeviceTmp->close(shakebuzzerDeviceTmp->pinNum);memset(Message[3], 0, sizeof Message[3]); //清空数组 sprintf(Message[3], "无震动 "); //更新震动信息 }else{memset(Message[3], 0, sizeof Message[3]); //清空数组 sprintf(Message[3], "有震动! ");shakebuzzerDeviceTmp->close(shakebuzzerDeviceTmp->pinNum);//关震动蜂鸣器}}}void *fire_thread(void *datas) //火灾线程{struct Devices *fireDeviceTmp = NULL;struct Devices *buzzerDeviceTmp = NULL;fireDeviceTmp = findDeviceByName("fireIfOrNot", pdeviceHead); //在设备工厂找到火焰模块和火焰蜂鸣器buzzerDeviceTmp = findDeviceByName("buzzer", pdeviceHead);if((fireDeviceTmp == NULL)&&(buzzerDeviceTmp == NULL)){printf("find fire or buzzer error\n");pthread_exit(NULL);}fireDeviceTmp->deviceInit(fireDeviceTmp->pinNum); //火灾模块初始化buzzerDeviceTmp->deviceInit(buzzerDeviceTmp->pinNum);//蜂鸣器初始化while(1){if(digitalRead(25) == 1){buzzerDeviceTmp->open(buzzerDeviceTmp->pinNum);//开火灾蜂鸣器memset(Message[2], 0, sizeof Message[2]); //清空数组 sprintf(Message[2], "无火灾"); //更新火灾信息}else{buzzerDeviceTmp->close(buzzerDeviceTmp->pinNum);//关火灾蜂鸣器memset(Message[2], 0, sizeof Message[2]); //清空数组 sprintf(Message[2], "有火灾! "); tmp = 0; }}}void *voice_thread(void* datas)//语音线程{struct InputCommander *voiceHandler;struct Devices *deviceTmp = NULL;int nread;voiceHandler = findCommandByName("voice", pCommandHead);//找语音节点if(voiceHandler == NULL){printf("find voice error\n");pthread_exit(NULL);}else{//找到了if(voiceHandler->Init(voiceHandler, NULL, NULL) < 0){//先初始化printf("voice init error\n");pthread_exit(NULL);//退出线程}else{printf("%s init success\n",voiceHandler->commandName);}pthread_mutex_lock(&mutex); //加锁//语音读取一级指令的时候,为了避免其它线程对于 紧接着读取二级指令的干扰while(1){//读数据memset(voiceHandler->command, '\0', sizeof(voiceHandler->command));nread = voiceHandler->getCommand(voiceHandler);//获取语音模块发来的数据printf("get voice command:%s\n", voiceHandler->command);if(nread == 0){printf("nodata from voice\n");}else if(strstr(voiceHandler->command, "kycd") != NULL)//1如果收到数据{deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开泳池灯}else if(strstr(voiceHandler->command, "gycd") != NULL){deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关泳池灯}else if(strstr(voiceHandler->command, "kwsd") != NULL)//{deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开卧室灯}else if(strstr(voiceHandler->command, "gwsd") != NULL){deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关卧室灯}else if(strstr(voiceHandler->command, "kysd") != NULL){deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开浴室灯}else if(strstr(voiceHandler->command, "gysd") != NULL){deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关浴室灯}else if(strstr(voiceHandler->command, "kcfd") != NULL){deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开厨房灯}else if(strstr(voiceHandler->command, "gcfd") != NULL){deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关厨房灯}else if(strstr(voiceHandler->command, "kfs") != NULL)//开风扇{deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);}else if(strstr(voiceHandler->command, "gfs") != NULL)//关风扇{deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);}else if(strstr(voiceHandler->command, "quankai") != NULL){deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开泳池灯deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开卧室灯deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开浴室灯deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开厨房灯deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开风扇}else if(strstr(voiceHandler->command, "quanguan") != NULL)//如果收到数据{deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关泳池灯deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关卧室灯deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关浴室灯deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关厨房灯deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关风扇}}}}void *read_thread(void *datas){ int n_read;struct Devices *deviceTmp = NULL;while(1){memset(socketHandler->command, '\0', sizeof(socketHandler->command));n_read = read(c_fd, socketHandler->command, sizeof(socketHandler->command));//客户端发来的数据存到 socketHandler->commandif(n_read == -1){perror("read");}else if(n_read > 0){printf("\nget: %d,%s\n",n_read,socketHandler->command);//打印客户端发来的数据//if (strstr(socketHandler->command, "kwsd") != NULL)if(strstr(socketHandler->command, "kycd") != NULL)//1如果收到数据{deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开泳池灯}else if(strstr(socketHandler->command, "gycd") != NULL){deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关泳池灯}else if(strstr(socketHandler->command, "kwsd") != NULL)//{deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开卧室灯}else if(strstr(socketHandler->command, "gwsd") != NULL){deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关卧室灯}else if(strstr(socketHandler->command, "kysd") != NULL){deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开浴室灯}else if(strstr(socketHandler->command, "gysd") != NULL){deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关浴室灯}else if(strstr(socketHandler->command, "kcfd") != NULL){deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开厨房灯}else if(strstr(socketHandler->command, "gcfd") != NULL){deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关厨房灯}else if(strstr(socketHandler->command, "kfs") != NULL)//开风扇{deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);}else if(strstr(socketHandler->command, "gfs") != NULL)//关风扇{deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);}else if(strstr(socketHandler->command, "quankai") != NULL){deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开泳池灯deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开卧室灯deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开浴室灯deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开厨房灯deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->open(deviceTmp->pinNum);//开风扇}else if(strstr(socketHandler->command, "quanguan") != NULL)//如果收到数据{deviceTmp = findDeviceByName("livingRoomLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关泳池灯deviceTmp = findDeviceByName("upstairLight",pdeviceHead);//通过名子找到节点deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关卧室灯deviceTmp = findDeviceByName("bathroomLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关浴室灯deviceTmp = findDeviceByName("restauranLight",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关厨房灯deviceTmp = findDeviceByName("fan",pdeviceHead);deviceTmp->deviceInit(deviceTmp->pinNum);//初始化deviceTmp->close(deviceTmp->pinNum);//关风扇}}else{printf("client quit\n");write_flag = 0;pthread_cancel(writeThread);pthread_exit(NULL);}}}void *write_thread(void *datas) //实时向客户端发送消息{ while (1) { delay(1000); write(c_fd, Message, 400); }}void *socket_thread(void* datas){int n_read = 0;struct sockaddr_in c_addr;memset(&c_addr, 0, sizeof(struct sockaddr_in));int clen = sizeof(struct sockaddr_in);socketHandler = findCommandByName("socketServer", pCommandHead);//找socket节点if(socketHandler == NULL){printf("find socketHandler error\n");pthread_exit(NULL);}else{printf("%s init success\n",socketHandler->commandName);} socketHandler->Init(socketHandler, NULL, NULL);//找到就初始化while(1){//只要有新的客户端接入 就创建新线程去对接c_fd = accept(socketHandler->sfd, (struct sockaddr *)&c_addr, &clen); pthread_create(&readThread, NULL, read_thread, NULL);//读客户端发来的数据 if (write_flag == 0){write_flag = 1;pthread_create(&writeThread, NULL, write_thread, NULL);//往客户端发数据 比如温湿度 }}}void *DHT11_thread(void* datas){struct Devices *DHT11DeviceTmp = NULL;DHT11DeviceTmp = findDeviceByName("DHT11", pdeviceHead); //在设备工厂找到温湿度模块DHT11DeviceTmp->deviceInit(DHT11DeviceTmp->pinNum); //温湿度模块初始化 while (1) { //pinMode(7, OUTPUT); // set mode to output // digitalWrite(7, 1); // output a high level delay(3000); if (DHT11DeviceTmp->deviceInit(DHT11DeviceTmp->pinNum)) { // printf("Sensor data read ok!\n");memset(Message[0], 0, sizeof Message[0]); //清空数组 memset(Message[1], 0, sizeof Message[1]); sprintf(Message[0], "湿度:%d.%d ", (databuf >> 24) & 0xff, (databuf >> 16) & 0xff); sprintf(Message[1], "温度:%d.%d ", (databuf >> 8) & 0xff, databuf & 0xff);//printf("shidu = %d.%d\n", (databuf >> 24) & 0xff, (databuf >> 16) & 0xff);//printf("wendu = %d.%d\n", (databuf >> 8) & 0xff, databuf & 0xff); databuf = 0; } else { printf("Sensor dosent ans!\n"); databuf = 0; } }}void *remote_thread(void *datas)//433m线程{int val0 = 0, val1 = 0, val2 = 0, val3 = 0; int temp0 = 0, temp1 = 0,temp2 = 0,temp3 = 0;int count0 = 0, count1 = 0, count2 = 0, count3 = 0;struct Devices *deviceTmp = NULL;wiringPiSetup(); pinMode(12, INPUT); pinMode(13, INPUT);pinMode(14, INPUT); pinMode(30, INPUT); digitalWrite(12, LOW); digitalWrite(13, LOW);digitalWrite(14, LOW); digitalWrite(30, LOW);while(1){val0 = digitalRead(12); val1 = digitalRead(13);val2 = digitalRead(14); val3 = digitalRead(30);if (val0 == 1) //电风扇遥控信号 { if(count0 == 0){ delay(500); if (temp0 == 0) //打开厨房灯 { printf("433M:open restauranLight\n"); temp0 = 1; deviceTmp = findDeviceByName("restauranLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->open(deviceTmp->pinNum); while(val0 == 0); } else if (temp0 == 1) //关闭厨房灯 { printf("433M:close restauranLight\n"); temp0 = 0; deviceTmp = findDeviceByName("restauranLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->close(deviceTmp->pinNum); }count0 = 1; } }else if (val0 == 0) { count0 = 0; }if (val1 == 1) //泳池灯遥控信号 { if(count1 == 0) {delay(500); if (temp1 == 0) //打开泳池灯 { printf("433M:open livingRoomLight\n"); temp1 = 1; deviceTmp = findDeviceByName("livingRoomLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->open(deviceTmp->pinNum); while(val1 == 0); } else if (temp1 == 1) //关闭泳池灯 { printf("433M:close livingRoomLight\n"); temp1 = 0; deviceTmp = findDeviceByName("livingRoomLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->close(deviceTmp->pinNum); }count1 = 1; } }else if (val1 == 0) { count1 = 0; }if (val2 == 1) //卧室灯遥控信号 { if(count2 == 0){delay(500); if (temp2 == 0) //打开卧室灯 { printf("433M:open upstairLight\n"); temp2 = 1; deviceTmp = findDeviceByName("upstairLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->open(deviceTmp->pinNum); while(val2 == 0); } else if (temp2 == 1) //关闭卧室灯 { printf("433M:close upstairLight\n"); temp2 = 0; deviceTmp = findDeviceByName("upstairLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->close(deviceTmp->pinNum); } count2 = 1; } }else if (val2 == 0) { count2 = 0; }if (val3 == 1) //浴室灯遥控信号 { if(count3 == 0){delay(500); if (temp3 == 0) //打开浴室灯 { printf("433M:open bathroomLight\n"); temp3 = 1; deviceTmp = findDeviceByName("bathroomLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->open(deviceTmp->pinNum); while(val3 == 0); } else if (temp3 == 1) //关闭浴室灯 { printf("433M:close bathroomLight\n"); temp3 = 0; deviceTmp = findDeviceByName("bathroomLight", pdeviceHead); deviceTmp->deviceInit(deviceTmp->pinNum); deviceTmp->close(deviceTmp->pinNum); } count3 = 1; } }else if (val3 == 0) { count3 = 0; }}}void *cameraThread_func(void *data) //起线程的函数有格式要求{ struct Devices *cameraTemp; cameraTemp = findDeviceByName("camera", pdeviceHead); //找到摄像头节点 if (cameraTemp == NULL) { printf("find camera error\n"); pthread_exit(NULL); //在线程中不用return } cameraTemp->justDoOnce(); //调用postUrl函数}void *key_thread(){ // pinMode(door_Lock, OUTPUT); //将门锁端口置为输出 int val; while (1) { val = digitalRead(key); // printf("key = %d\n", val); if (val == 0) //防止重复检测 { delay(500); val = digitalRead(key); // printf("key = %d\n", val); if (val == 1) //按键按下,启动人脸识别线程 { pthread_create(&cameraThread, NULL, cameraThread_func, NULL); } } }}int main(){char name[128];struct Devices *tmp = NULL; if(-1 == wiringPiSetup()){return -1;}//1.指令工厂初始化pCommandHead = addvoiceContrlToInputCommandLink(pCommandHead);//语音pCommandHead = addSocketContrlToInputCommandLink(pCommandHead);//socket//2.设备控制工厂初始化pdeviceHead = addBathroomLightToDeviceLink(pdeviceHead);pdeviceHead = addUpstairLightToDeviceLink(pdeviceHead);pdeviceHead = addRestauranLightToDeviceLink(pdeviceHead);pdeviceHead = addLivingRoomLightToDeviceLink(pdeviceHead);pdeviceHead = addfireToDeviceLink(pdeviceHead);//火灾模块pdeviceHead = addbuzzerToDeviceLink(pdeviceHead);//火灾蜂鸣器pdeviceHead = addshakebuzzerToDeviceLink(pdeviceHead);//震动蜂鸣器pdeviceHead = addfanToDeviceLink(pdeviceHead);pdeviceHead = addDHT11ToDeviceLink(pdeviceHead);pdeviceHead = addcameraToDeviceLink(pdeviceHead);//摄像头pdeviceHead = addShakeToDeviceLink(pdeviceHead);//震动模块pdeviceHead = addwindowToDeviceLink(pdeviceHead);//3.线程池建立//int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine)(void*), void *arg)//3.1 语音线程pthread_create(&voiceThread, NULL, voice_thread, NULL);//3.2 socket线程pthread_create(&socketThread, NULL, socket_thread, NULL);//3.3火灾线程pthread_create(&fireThread, NULL, fire_thread, NULL); //3.4 摄像头线程 这里把摄像头设为了开机自启 //3.5 温湿度线程pthread_create(&DHT11Thread, NULL, DHT11_thread, NULL);//3.6 震动线程pthread_create(&shakeThread, NULL, shake_thread, NULL);//3.7 窗户线程pthread_create(&windowThread, NULL, window_thread, NULL);//3.8 按钮线程pthread_create(&keyThread, NULL, key_thread, NULL);//3.9 433m线程pthread_create(&remoteThread, NULL, remote_thread, NULL);pthread_join(voiceThread, NULL);pthread_join(socketThread, NULL);pthread_join(fireThread, NULL);pthread_join(DHT11Thread, NULL);pthread_join(writeThread, NULL);pthread_join(shakeThread, NULL);pthread_join(windowThread, NULL);pthread_join(keyThread, NULL);pthread_join(cameraThread, NULL);pthread_join(remoteThread, NULL);return 0;}contrlDevices.h
#include<stdlib.h>#include<wiringPi.h>#include <curl/curl.h>typedef unsigned int bool;struct Devices{char deviceName[128];//int status;//状态 : 开/关int pinNum;int (*open)(int pinNum);int (*close)(int pinNum);int (*deviceInit)(int pinNum);int (*readStatus)(int pinNum);int (*changeStatus)(int status);//摄像头相关的void (*justDoOnce)();char* (*getFace)(); char* (*getPicFromOCRBase64)(); size_t (*readData)(); struct Devices *next;};struct Devices* addBathroomLightToDeviceLink(struct Devices *phead);struct Devices* addUpstairLightToDeviceLink(struct Devices *phead);struct Devices* addRestauranLightToDeviceLink(struct Devices *phead);struct Devices* addLivingRoomLightToDeviceLink(struct Devices *phead);struct Devices* addfireToDeviceLink(struct Devices *phead);struct Devices* addfanToDeviceLink(struct Devices *phead);struct Devices* addDHT11ToDeviceLink(struct Devices *phead);struct Devices *addShakeToDeviceLink(struct Devices *phead);struct Devices* addbuzzerToDeviceLink(struct Devices *phead);//火灾蜂鸣器struct Devices* addshakebuzzerToDeviceLink(struct Devices *phead);//震动蜂鸣器struct Devices* addwindowToDeviceLink(struct Devices *phead);struct Devices *addcameraToDeviceLink(struct Devices *phead);//摄像头结点InputCommand.h
#include<stdlib.h>#include<wiringPi.h>struct InputCommander//{char commandName[128];//名字char deviceName[128];//设备名char command[32];//指令int (*Init)(struct InputCommander *voicer, char *ipAdress, char *port);//操作函数 : 串口号 ip 端口号 int (*getCommand)(struct InputCommander *voicer);//char log[1024];//日志int fd;char port[12];//端口号char ipAddress[32];//ip地址int sfd;struct InputCommander *next; };struct InputCommander* addvoiceContrlToInputCommandLink(struct InputCommander *phead);struct InputCommander* addSocketContrlToInputCommandLink(struct InputCommander *phead);bathroomLight.c(四个房间小灯,风扇代码基本相似,这里只展示其中一个)
#include"contrlDevices.h"#include<stdlib.h>#include<fcntl.h>int bathroomLightOpen(int pinNum){digitalWrite(pinNum,LOW);}int bathroomLightClose(int pinNum){digitalWrite(pinNum,HIGH);}int bathroomLightCloseInit(int pinNum){pinMode(pinNum,OUTPUT);digitalWrite(pinNum,HIGH);}int bathroomLightCloseStatus(int status){}struct Devices bathroomLight = {//这里是在定义的同时赋值.deviceName = "bathroomLight",.pinNum = 22,.open = bathroomLightOpen,.close = bathroomLightClose,.deviceInit = bathroomLightCloseInit,.changeStatus = bathroomLightCloseStatus};struct Devices* addBathroomLightToDeviceLink(struct Devices *phead){if(phead == NULL){return &bathroomLight;}else{bathroomLight.next = phead;phead = &bathroomLight;return phead;}}window.c
#include"contrlDevices.h"#include<stdlib.h>#include<fcntl.h>int windowOpen(int pinNum){digitalWrite(2,LOW);digitalWrite(3,HIGH);}int windowClose(int pinNum){digitalWrite(2,HIGH);digitalWrite(3,LOW);}int windowCloseInit(int pinNum)//用的L9110电机实现正反转,所以要初始化两个引脚{pinMode(2,OUTPUT);pinMode(3,OUTPUT);digitalWrite(2,LOW);digitalWrite(3,LOW);//2和3都配置为低电平 默认不转pinMode(4,OUTPUT);digitalWrite(4,HIGH);pinMode(0,OUTPUT);//门锁初始化digitalWrite(0,HIGH);}int windowCloseStatus(int status){}struct Devices window = {.deviceName = "window",.pinNum = 2,.open = windowOpen,.close = windowClose,.deviceInit = windowCloseInit,.changeStatus = windowCloseStatus};struct Devices* addwindowToDeviceLink(struct Devices *phead){if(phead == NULL){return &window;}else{window.next = phead;phead = &window;return phead;}}DHT11.c
#include"contrlDevices.h"#include<stdlib.h>#include<fcntl.h>#include <stdio.h>#include <string.h>#include <unistd.h>#include <stdint.h>typedef unsigned char uint8;typedef unsigned int uint16;typedef unsigned long uint32; #define HIGH_TIME 32 int pinNumber = 7;uint32 databuf;int DHT11CloseInit(int pinNum){uint8 crc; uint8 i; pinMode(pinNumber, OUTPUT); // set mode to output digitalWrite(pinNumber, 0); // output a high level delay(25); digitalWrite(pinNumber, 1); // output a low level pinMode(pinNumber, INPUT); // set mode to input pullUpDnControl(pinNumber, PUD_UP); delayMicroseconds(27); if (digitalRead(pinNumber) == 0) //SENSOR ANS { while (!digitalRead(pinNumber)) ; //wait to high for (i = 0; i < 32; i++) { while (digitalRead(pinNumber)) ; //data clock start while (!digitalRead(pinNumber)) ; //data start delayMicroseconds(HIGH_TIME); databuf *= 2; if (digitalRead(pinNumber) == 1) //1 { databuf++; } } for (i = 0; i < 8; i++) { while (digitalRead(pinNumber)) ; //data clock start while (!digitalRead(pinNumber)) ; //data start delayMicroseconds(HIGH_TIME); crc *= 2; if (digitalRead(pinNumber) == 1) //1 { crc++; } } return 1; } else { return 0; }}int DHT11Open(int pinNum){}int DHT11Close(int pinNum){}int DHT11CloseStatus(int status){}struct Devices DHT11 = {//这里是在定义的同时赋值.deviceName = "DHT11",.pinNum = 7,.open = DHT11Open,.close = DHT11Close,.deviceInit = DHT11CloseInit,.changeStatus = DHT11CloseStatus};struct Devices* addDHT11ToDeviceLink(struct Devices *phead){if(phead == NULL){return &DHT11;}else{DHT11.next = phead;phead = &DHT11;return phead;}}voiceContrl.c
#include<unistd.h>#include<wiringPi.h>#include<stdlib.h>#include<stdio.h>#include<string.h>#include<wiringSerial.h>#include"InputCommand.h"int voiceGetCommand(struct InputCommander *voicer){int nread = 0;memset(voicer->command, '\0', sizeof(voicer->command));nread = read(voicer->fd, voicer->command, sizeof(voicer->command));if(nread == 0){printf("voice no datas\n");}else{return nread;}}int voiceInit(struct InputCommander *voicer, char *ipAdress, char *port){int fd;if((fd = serialOpen("/dev/ttyAMA0",9600))==-1)//初始化串口,波特率9600{printf("voice init error\n");exit(-1);}voicer->fd = fd;return fd;}struct InputCommander voiceContrl = {.commandName = "voice",.deviceName = "/dev/ttyAMA0",//设备名.command = {'\0'},//指令.Init = voiceInit,//串口初始化.getCommand = voiceGetCommand,.log = {'\0'},.next = NULL};struct InputCommander* addvoiceContrlToInputCommandLink(struct InputCommander *phead){if(phead == NULL){return &voiceContrl;}else{voiceContrl.next = phead;phead = &voiceContrl;return phead;}}socketContrl.c
#include<unistd.h>#include<wiringPi.h>#include<stdlib.h>#include<stdio.h>#include<wiringSerial.h>#include <sys/types.h>#include <sys/socket.h>#include <arpa/inet.h>#include <netinet/in.h>#include <string.h>#include"InputCommand.h"int socketGetCommand(struct InputCommander *socketMes){int c_fd;int n_read = 0;struct sockaddr_in c_addr;memset(&c_addr, 0, sizeof(struct sockaddr_in));int clen = sizeof(struct sockaddr_in);//4. acceptc_fd = accept(socketMes->sfd, (struct sockaddr *)&c_addr, &clen);n_read = read(c_fd, socketMes->command, sizeof(socketMes->command)); if(n_read == -1){perror("read");}else if(n_read > 0){printf("\nget: %d\n",n_read);}else{printf("client quit\n");}return n_read;}int socketInit(struct InputCommander *socketMes, char *ipAdress, char *port){int s_fd; struct sockaddr_in s_addr; memset(&s_addr, 0, sizeof(struct sockaddr_in));//1.socket s_fd = socket(AF_INET, SOCK_STREAM, 0); if (s_fd == -1) { perror("socket"); exit(-1); } s_addr.sin_family = AF_INET; s_addr.sin_port = htons(atoi(socketMes->port)); //atoi()把ascii转成整形数 //htons()返回网络字节序的值(大段字节序) inet_aton(socketMes->ipAddress, &(s_addr.sin_addr)); //aton()把字符串形式的IP转换成网络能识别的格式 //解决服务器程序结束后端口被占用的情况int opt = 1;setsockopt(s_fd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt)); //2.bindbind(s_fd, (struct sockaddr *)&s_addr, sizeof(struct sockaddr_in));//3.listenlisten(s_fd, 10);printf("socket server listening...\n");socketMes->sfd = s_fd;return s_fd;}struct InputCommander socketContrl = {.commandName = "socketServer",.command = {'\0'},//指令.port = "8083",.ipAddress = "192.168.101.223",.Init = socketInit,//初始化.getCommand = socketGetCommand,.log = {'\0'},.next = NULL};struct InputCommander* addSocketContrlToInputCommandLink(struct InputCommander *phead){if(phead == NULL){return &socketContrl;}else{socketContrl.next = phead;phead = &socketContrl;return phead;}}Camera.c
#include "contrlDevices.h"#include <stdio.h>#include <unistd.h>#include <string.h>#include <stdlib.h>#include <curl/curl.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <sys/types.h>#include <unistd.h>#define door_lock 0 //门锁void postUrl();size_t readData1(void *ptr, size_t size, size_t nmemb, void *stream);char* getFace1();char* getPicFromOCRBase641(char *Filepath);struct Devices* addcameraToDeviceLink(struct Devices *phead);int cameraInit(int pinNum);char ocrRetBuf[1024] = {'\0'};size_t readData1(void *ptr, size_t size, size_t nmemb, void *stream)//回调函数,把从后台的数据拷贝给ocrRetBuf{ strncpy(ocrRetBuf,ptr,1024);//ocrRetBuf接收从OCR后台返回的数据,并打印 printf("%s\n",ocrRetBuf);}char* getFace1(){printf("pai zhao zhong\n");//system("raspistill -q 5 -t 1 -o image.jpg");system("wget http://192.168.101.223:8080/?action=snapshot -O ./image.jpg ");while(access("./image.jpg",F_OK) != 0); //判断是否拍照完毕printf("paizhao wanbi\n");char* base64BufFaceRec = getPicFromOCRBase641("./image.jpg");//system("rm image.jpg");return base64BufFaceRec; //返回刚才拍照的base64}char *getPicFromOCRBase641(char *Filepath){ int fd; int filelen; char cmd[128]={'\0'}; sprintf(cmd,"base64 %s > tmpFile",Filepath); system(cmd); fd=open("./tmpFile",O_RDWR); filelen=lseek(fd,0,SEEK_END);//计算文件大小 lseek(fd,0,SEEK_SET); //移动光标到头 char *bufpic=(char *)malloc(filelen+2); memset(bufpic,'\0',filelen+2); read(fd,bufpic,filelen+128); //把内容读到bufpic内 system("rm -rf tmpFile");//删除这个临时文件 close(fd); return bufpic; //返回bufpic这个地址}void postUrl(){ CURL *curl; CURLcode res; char* key = "5xxxsWxxxGfP2pmxxxchSJ";//翔云平台购买人脸识别后的key char* secret = "396xxxd33xxx487exxxf139axxx6d789";//翔云平台购买人脸识别后的secret int typeId = 21; char* format = "xml"; char* base64BufPic1 = getFace1(); char* base64BufPic2 = getPicFromOCRBase641("lit1.jpg"); int len = strlen(key)+strlen(secret)+strlen(base64BufPic1)+strlen(base64BufPic2)+128; char* postString = (char* )malloc(len); memset(postString,'\0',len); sprintf(postString,"img1=%s&img2=%s&key=%s&secret=%s&typeId=%d&format=%s",base64BufPic1,base64BufPic2,key,secret,typeId,format);//根据平台的传参格式编写 curl = curl_easy_init(); if(curl){ curl_easy_setopt(curl, CURLOPT_POSTFIELDS, postString); //指定post内容,传入参数 curl_easy_setopt(curl, CURLOPT_URL, "https://netocr.com/api/faceliu.do");// 指定url curl_easy_setopt(curl, CURLOPT_WRITEFUNCTION,readData1); //回调函数readDate读取返回值 res = curl_easy_perform(curl); printf("OK:%d\n",res); if(strstr(ocrRetBuf,"是") != NULL){ //判断翔云后台返回的字符串中有没有“是” printf("the same person\n");digitalWrite(door_lock, LOW); //打开门锁 delay(3000); //等待3s digitalWrite(door_lock, HIGH); //关闭门锁 } else{ printf("different person\n"); } curl_easy_cleanup(curl); }}int cameraInit(int pinNum)//该函数无用{pinMode(0,OUTPUT);digitalWrite(0,HIGH);}struct Devices camera = {.deviceName = "camera",.deviceInit = cameraInit,.pinNum = 0, //此引脚号无用.justDoOnce = postUrl,.getFace = getFace1,.getPicFromOCRBase64 = getPicFromOCRBase641,.readData = readData1};struct Devices* addcameraToDeviceLink(struct Devices *phead){if(phead == NULL){return &camera;}else{camera.next = phead;phead = &camera;}}其余代码和上面展示的有些很类似,就不放出了。
四.项目总结
1.做完后感觉不是很难,主要是要明白这个项目代码的设计结构和里面的一些逻辑。
2.人脸识别功能的整合是这个项目相对复杂的地方,这里我也参考了其他博客。
3.前面学到的编写树莓派驱动代码,各种库的使用是重点,以后也会复习。
4.火焰和震动传感器可以同时只使用一个蜂鸣器,风扇有时会出现一些小bug,代码还有优化的地方。